ТОПОЛОГИЯ, раздел математики, занимающийся изучением свойств фигур (или пространств), которые сохраняются при непрерывных деформациях, таких, например, как растяжение, сжатие или изгибание. Непрерывная деформация – это деформация фигуры, при которой не происходит разрывов (т.е. нарушения целостности фигуры) или склеиваний (т.е. отождествления ее точек).
Такие геометрические свойства связаны с положением, а не с формой или величиной фигуры. В отличие от евклидовой и римановой геометрий, геометрии Лобачевского и других геометрий, занимающихся измерением длин и углов, топология имеет неметрический и качественный характер. Раньше она носила названия «анализ ситус» (анализ положения), а также «теория точечных множеств». В научно-популярной литературе топологию часто называют «геометрией на резиновом листе», поскольку ее наглядно можно представлять себе как геометрию фигур, нарисованных на идеально упругих резиновых листах, которые подвергаются растяжению, сжатию или изгибанию. Топология – один из новейших разделов математики.
Виктор Вахштайн — Социальная топология
История.
В 1640 французский философ и математик Р.Декарт (1596–1650) нашел инвариантное соотношение между числом вершин, ребер и граней простых многогранников. Это соотношение Декарт выразил формулой V – E + F = 2, где V – число вершин, E – число ребер и F – число граней. В 1752 швейцарский математик Л.Эйлер (1707–1783) дал строгое доказательство этой формулы.
Еще один вклад Эйлера в развитие топологии – это решение знаменитой задачи о кёнигсбергских мостах. Речь шла об острове на реке Прегель в Кёнигсберге (в том месте, где река разделяется на два рукава – Старый и Новый Прегель) и семи мостах, соединяющих остров с берегами.
Задача состояла в том, чтобы выяснить, можно ли обойти все семь мостов по непрерывному маршруту, побывав на каждом только один раз и вернувшись в исходную точку. Эйлер заменил участки суши точками, а мосты – линиями. Полученную конфигурацию Эйлер назвал графом, точки – его вершинами, а линии – ребрами.
Вершины он разделил на четные и нечетные в зависимости от того, четное или нечетное число ребер выходит из вершины. Эйлер показал, что все ребра графа можно обойти ровна по одному разу по непрерывному замкнутому маршруту, лишь если граф содержит только четные вершины. Так как граф в задаче о кёнигсбергских мостах содержит только нечетные вершины, мосты невозможно обойти по непрерывному маршруту, побывав на каждом ровно по одному разу и вернувшись к началу маршрута.
Предложенное Эйлером решение задачи о кенигсбергских мостах зависит только от взаимного расположения мостов. Оно положило формальное начало топологии как разделу математики. К.Гаусс (1777–1855) создал теорию узлов, которой позднее занимались И.Листинг (1808–1882), П.Тэйт (1831–1901) и Дж.Александер. В 1840 А.Мёбиус (1790–1868) сформулировал так называемую проблему четырех красок, которую впоследствии исследовали О.де Морган (1806–1871) и А.Кэли (1821–1895). Первым систематическим трудом по топологии были Предварительные исследования по топологии Листинга (1874).
09. Топология
Основателями современной топологии являются Г.Кантор (1845–1918), А.Пуанкаре (1854–1912) и Л.Брауэр (1881–1966).
Разделы топологии.
Топологию можно подразделить на три области: 1) комбинаторную топологию, изучающую геометрические формы посредством их разбиения на простейшие фигуры, регулярным образом примыкающие друг к другу; 2) алгебраическую топологию, занимающуюся изучением алгебраических структур, связанных с топологическими пространствами, с упором на теорию групп; 3) теоретико-множественную топологию, изучающую множества как скопления точек (в отличие от комбинаторных методов, представляющих объект как объединение более простых объектов) и описывающую множества в терминах таких топологических свойств, как открытость, замкнутость, связность и т.д. Разумеется, такое деление топологии на области в чем-то произвольно; многие топологи предпочитают выделять в ней другие разделы.
Некоторые основные понятия.
Топологическое пространство состоит из множества точек S и набора S подмножеств множества S, удовлетворяющего следующим аксиомам:
(1) все множество S и пустое множество принадлежат набору S;
(2) объединение любой совокупности множеств из S есть множество из S;
(3) пересечение любого конечного числа множеств из S есть множество из S.
Множества, входящие в набор S, называются открытыми множествами, а сам этот набор – топологией в S. См. МНОЖЕСТВ ТЕОРИЯ.
Топологическое преобразование, или гомеоморфизм, одной геометрической фигуры S на другую, Sў, – это отображение (p ® pў) точек p из S в точки pў из Sў, удовлетворяющее следующим условиям: 1) устанавливаемое им соответствие между точками из S и Sў взаимно однозначно, т.е. каждой точке p из S соответствует только одна точка pў из Sў и в каждую точку pў отображается только одна точка p; 2) отображение взаимно непрерывно (непрерывно в обе стороны), т.е. если заданы две точки p, q из S и точка p движется так, что расстояние между ней и точкой q стремится к нулю, то расстояние между соответствующими точками pў, qў из Sў также стремится к нулю, и наоборот.
Геометрические фигуры, переходящие одна в другую при топологических преобразованиях, называются гомеоморфными. Окружность и граница квадрата гомеоморфны, так как их можно перевести друг в друга топологическим преобразованием (т.е. изгибанием и растяжением без разрывов и склеиваний, например, растяжением границы квадрата на описанную вокруг него окружность). Сфера и поверхность куба также гомеоморфны. Чтобы доказать гомеоморфность фигур, достаточно указать соответствующее преобразование, но тот факт, что для каких-то фигур найти преобразование нам не удается, не доказывает, что эти фигуры не гомеоморфны. Здесь помогают топологические свойства.
Топологическим свойством (или топологическим инвариантом) геометрических фигур называется свойство, которым вместе с данной фигурой обладает также любая фигура, в которую она переходит при топологическом преобразовании.
Любое открытое связное множество, содержащее по крайней мере одну точку, называется областью.
Область, в которой любую замкнутую простую (т.е. гомеоморфную окружности) кривую можно стянуть в точку, оставаясь все время в этой области, называется односвязной, а соответствующее свойство области – односвязностью. Если же некоторую замкнутую простую кривую этой области нельзя стянуть в точку, оставаясь все время в этой области, то область называется многосвязной, а соответствующее свойство области – многосвязностью.
Представьте себе две круговые области, или диски, одну без дыр, а другую с дырами. Первая область односвязна, вторая многосвязна. Односвязность и многосвязность – топологические свойства. Область с дырой не может перейти при гомеоморфизме в область без дыр. Интересно отметить, что если в многосвязном диске провести по разрезу от каждой из дыр до края диска, то он станет односвязным.
Максимальное число замкнутых простых непересекающихся кривых, по которым можно разрезать замкнутую поверхность, не разделяя ее на отдельные части, называется родом поверхности. Род – топологический инвариант поверхности. Можно доказать, что род сферы равен нулю, род тора (поверхности «бублика») – единице, род кренделя (тора с двумя дырками) – двум, род поверхности с p дырами равен p. Отсюда следует, что ни поверхность куба, ни сфера не гомеоморфны тору.
Среди топологических инвариантов поверхности можно также отметить число сторон и число краев. Диск имеет 2 стороны, 1 край и род 0. Тор имеет 2 стороны, не имеет краев, а его род равен 1.
Введенные выше понятия позволяют уточнить определение топологии: топологией называется раздел математики, изучающий свойства, которые сохраняются при гомеоморфизмах.
Важные проблемы и результаты.
Теорема Жордана о замкнутой кривой.
Если на поверхности проведена простая замкнутая кривая, то существует ли какое-либо свойство кривой, которое сохраняется при деформации поверхности? Существование такого свойства вытекает из следующей теоремы: простая замкнутая кривая на плоскости делит плоскость на две области, внутреннюю и внешнюю. Эта кажущаяся тривиальной теорема очевидна для кривых простого вида, например, для окружности; однако для сложных замкнутых ломаных дело обстоит иначе. Теорема была впервые сформулирована и доказана К.Жорданом (1838–1922); однако доказательство Жордана оказалось ошибочным. Удовлетворительное доказательство было предложено О.Вебленом (1880–1960) в 1905.
Теорема Брауэра о неподвижной точке.
Пусть D – замкнутая область, состоящая из окружности и ее внутренности. Теорема Брауэра утверждает, что для любого непрерывного преобразования, переводящего каждую точку области D в точку этой же области, существует некоторая точка, которая остается неподвижной при этом преобразовании. (Преобразование не предполагается взаимно однозначным.) Теорема Брауэра о неподвижной точке представляет особый интерес потому, что она, по-видимому, является, наиболее часто используемой в других разделах математики топологической теоремой.
Проблема четырех красок.
Проблема заключается в следующем: можно ли любую карту раскрасить в четыре цвета так, чтобы любые две страны, имеющие общую границу, были раскрашены в различные цвета? Проблема четырех красок топологическая, так как ни форма стран, ни конфигурация границ не имеют значения.
Гипотеза о том, что четырех красок достаточно для соответствующей раскраски любой карты, была впервые высказана в 1852. Опыт показал, что четырех красок действительно достаточно, но строгого математического доказательства не удавалось получить на протяжении более ста лет. И только в 1976 К.Аппель и В.Хакен из Иллинойского университета, затратив более 1000 часов компьютерного времени, добились успеха.
Односторонние поверхности.
Простейшей односторонней поверхностью является лист Мёбиуса, названный так в честь А.Мёбиуса, открывшего его необычайные топологические свойства в 1858. Пусть ABCD (рис. 2,а) – прямоугольная полоска бумаги. Если склеить точку A с точкой B, а точку C с точкой D (рис.
2,б), то получится кольцо с внутренней поверхностью, наружной поверхностью и двумя краями. Одну сторону кольца (рис. 2,б) можно окрасить. Окрашенная поверхность будет ограничена краями кольца. Жук может совершить «кругосветное путешествие» по кольцу, оставаясь либо на окрашенной, либо на неокрашенной поверхности.
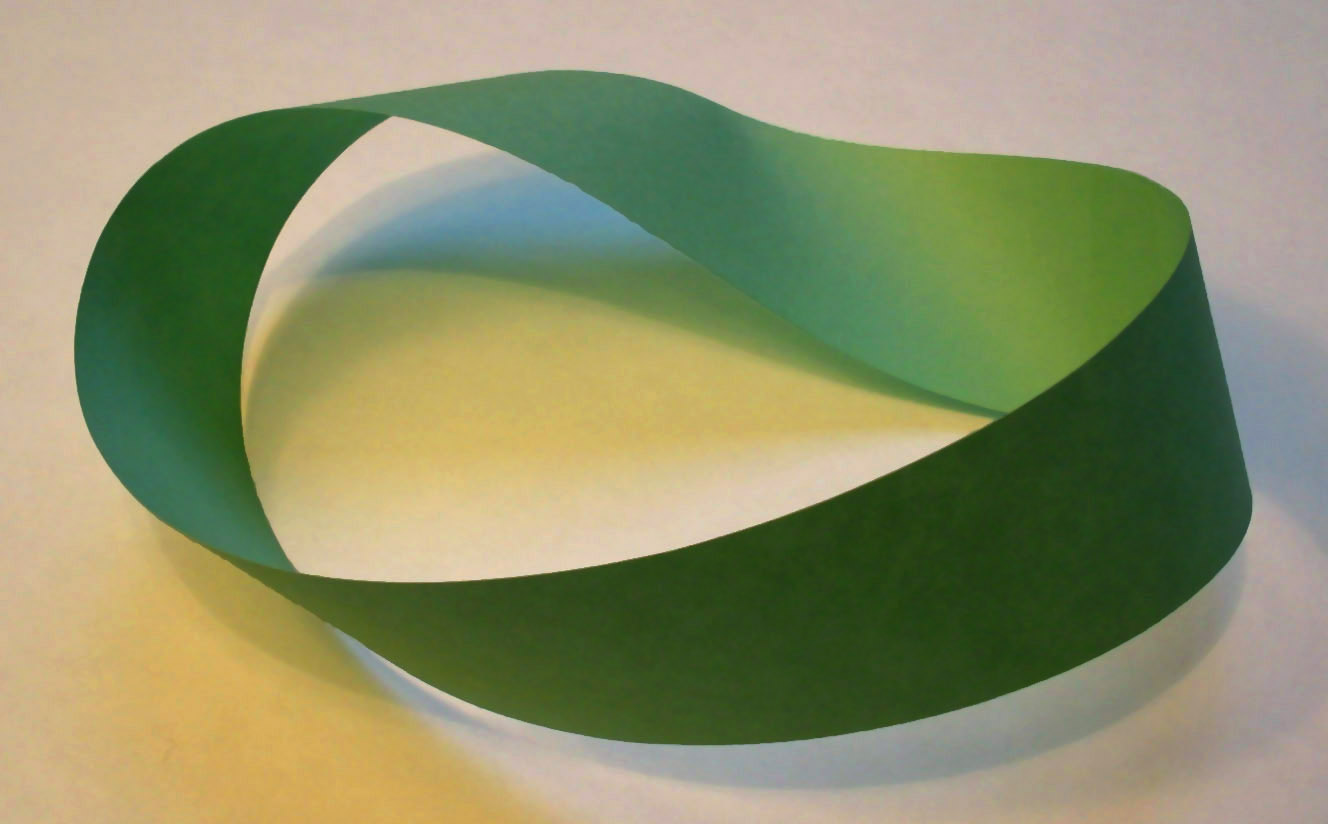
Но если полоску перед склеиванием концов перекрутить на полоборота и склеить точку A с точкой C, а B с D, то получится лист Мёбиуса (рис. 2,в). У этой фигуры есть только одна поверхность и один край. Любая попытка окрасить только одну сторону листа Мёбиуса обречена на неудачу, так как у листа Мёбиуса всего одна сторона.
Жук, ползущий по середине листа Мёбиуса (не пересекая края), вернется в исходную точку в положении «вверх ногами». При разрезании листа Мёбиуса по средней линии он не распадается на две части.
Узел можно представлять себе как запутанный кусок тонкой веревки с соединенными концами, расположенный в пространстве. Простейший пример – из куска веревки сделать петлю, пропустить один из ее концов сквозь петлю и соединить концы. В результате мы получим замкнутую кривую, которая остается топологически той же самой, как бы ее ни растягивать или скручивать, не разрывая и не склеивая при этом отдельные точки. Проблема классификации узлов по системе топологических инвариантов пока не решена.
Ху Сы-цзян. Теория гомотопий. М., 1964
Куратовский А. Топология, тт. 1–2. М., 1966, 1969
Спеньер Э. Алгебраическая топология. М., 1971
Александров П.С. Введение в теорию множеств и общую топологию. М., 1977
Келли Дж. Общая топология. М., 1981
Как звали математика, который в 19 лет решил задачу, не поддававшуюся усилиям лучших геометров со времен Евклида?
Источник: www.krugosvet.ru
Проектирование топологии объектов
Автоматизированные системы проектирования объектов строительства (АСПОС) в общем случае решают задачи топологии объектов:
— для региона – в виде зональных схем размещения объектов с указанием транспортных коммуникаций;
— для города – в виде генплана;
— для зданий – в виде объемно-планировочных решений этих зданий (ОПР).
Место этих задач в АСПОС показано на рис. 3.1.
Рисунок 3.1 – Схема АСПОС
Решение задач топологии проектирования объектов сводится к человеко-машинной процедуре (рис. 3.2).
Рисунок 3.2 – Человеко-машинная процедура проектирования топологии объектов
Разработка вариантов компоновки, архитектуры объектов включает большой объем работ творческого характера, осуществляется без четкого описания исходных данных (часто в условиях неопределенности), зависит от ситуации, опыта и личностных качеств проектировщика. Такая деятельность практически не поддается формализации, и ее проще выполнять человеку, чем поручать ЭВМ.
То же можно сказать о выборе критериев для оценки вариантов и тем более – о принятии решения. Достаточно просто поручить машине хранение информации о построенных или проектировавшихся ранее объектах, произвести оценку вариантов по заданным критериям и оформить графически проектное решение. Для оценки вариантов генплана пользователь должен ввести в ЭВМ четыре группы исходных данных. Это информация о местности, размещаемых объектах, разрывах между объектами и коммуникациях.
Информация о местности представляет собой цифровую модель местности (ЦММ) – план местности с цифровыми или символьными кодами о ситуации в отдельных ее зонах, участках. ЦММ может быть модульная (блочная) с разбивкой плана наложением сетки и полигонная, на которой участки местности показываются в виде полигонов (зон).
Модульная ЦММ удобнее в математическом описании информации, но требует довольно частую сетку для сложной ситуации на местности. На полигонной ЦММ значительно удобнее описывать линейные объекты (коммуникации), поскольку для этого достаточно задать уравнения прямых участков, проходящие через определенные точки.
В настоящее время разработаны геодезические приборы, имеющие встроенные ЭВМ и позволяющие получить ЦММ в процессе геодезической съемки местности.
Информация о размещаемых объектах представляется с помощью реляционной модели базы данных в виде таблицы с описанием наименования объектов, их назначения и основных технико-экономических показателей. Информация по отдельному объекту в цифровых кодах представляет собой цифровую модель объекта (ЦМО).
Информация о разрывах содержит требования к расположению объектов с учетом технологии работ, экологические, противопожарные и требования социального характера.
Информация о коммуникациях включает в себя описание сети автомобильных и железных дорог, станций примыкания, водных и воздушных путей сообщения, линий электропередач, трансформаторных подстанций.
В качестве примеров рассмотрим задачи проектирования вертикальной планировки участка строительства, размещения объектов на генплане и разработки объемно-планировочного решения здания.
Рисунок 3.3 – ДЦ для проектирования водоотвода
1. Вертикальная планировка участка, водоотвод
Вертикальная планировка местности осуществляется для обеспечения нормального водоотвода с участка путем создания необходимых уклонов поверхности или устройства дренажной системы открытого типа (канав) или закрытого типа (дренажные трубы). На рис. 3.3 показано ДЦ для проектирования водоотвода.
Вертикальная планировка с созданием уклонов поверхности осуществляется по сетке квадратов 40 40 м или 10 10 м или же исправлением горизонталей. При проектировании по квадратам в узлах указываются черные, красные и рабочие отметки. Красная (проектная) поверхность должна обеспечить нормальный водоотвод, при этом объем земляных работ должен быть минимальным и с минимальным перемещением грунта.
Рисунок 3.4 – Продольный профиль дороги
При проектировании дорог вертикальную планировку удобно производить по продольным и поперечным профилям с черными, красными и рабочими отметками (рис. 3.4).
Дренажные системы открытого типа представляют собой систему канав, обычно без крепления откосов, расположенных в плане таким образом, чтобы общий уклон по дну канав и их сечения обеспечивали водоотвод.
Дренажные системы закрытого типа – это те же канавы (траншеи), заполненные фильтрующей засыпкой из щебня или гравия. Для улучшения водоотвода по дну траншей могут укладываться трубы – деревянные, асбоцементные, керамические или железобетонные (при больших диаметрах). Дренажные трубы отводят воду к коллекторам – заглубленным трубам с большим диаметром. По длине коллектора устраиваются ливнеприемные и смотровые колодцы (рис. 3.5).
Рисунок 3.5 – Дренажная система водоотвода
Смотровые колодцы служат для периодического осмотра и очистки коллектора. Ливнеприемные колодцы закрыты сверху решеткой, обеспечивающей прием поверхностных вод, предусмотренных вертикальной планировкой участка.
В системе водоотвода часто возникает потребность отвести воду под дорожным полотном на другую сторону дороги. В этих случаях устраиваются перепуски воды из железобетонных труб диаметром 0,5…0,8 м.
Торцевые части перепуска укрепляют железобетонными оголовками (рис. 3.6).
Рисунок 3.6 – Перепуски под дорожным полотном
Лучшее проектное решение для водоотвода найдется после анализа ДЦ (см. рис. 3.3) с оценкой глобального оптимума по заданному критерию.
Минимальным по стоимости и трудоемкости является устройство водоотвода в виде системы открытых канав с перепусками под дорогами. Обычно такое решение применяется в качестве временного для осушения участка.
Максимальным по стоимости, но и наилучшим для эксплуатации является решение с насыпью 0,5 м из щебня (гравия) с песком после удаления растительного грунта с устройством дренажной системы закрытого типа. Такое упрощенное решение в местах интенсивных нагрузок от транспорта может иметь дорожную одежду из асфальто- или цементобетона.
3.2 Размещение объектов на генплане
Для разработки и оценки вариантов городской застройки применяется «Координатный метод» и метод с использованием «транспортной задачи».
Наиболее простым является «Координатный метод». Вариант с планировкой города покрывается прямоугольной координатной сеткой и далее, с помощью ЭВМ, подсчитываются критерии – число жителей в микрорайонах, объем перевозок пассажиров в пункты обслуживания, протяженность коммуникаций и т. д. Подсчет производится с использованием координат объектов застройки.
Несколько сложнее метод с использованием «транспортной задачи» линейного программирования. Пусть:
n – число жилых домов (объектов или пунктов обслуживания);
A – население района;
ai – население дома (i 1, 2, . n);
B – численность населения, обслуживаемого культурно-бытовыми учреждениями;
bj – численность населения, обслуживаемого в пункте j ( j 1, 2, . m);
Cij – затраты материальных ресурсов на перемещение одного человека к пункту обслуживания;
xij – число человек, перемещающихся из пункта i в пункт j .
На рис. 3.7 показана схема компоновки района при n = 3 и m = 2. Область допустимых значений исходных параметров xij определяется уравнениями:
Рисунок 3.7 – Пример компоновки объектов
Критерием оценки вариантов компоновки является целевая функция для минимума затрат ресурсов:
Решение задачи может быть получено с использованием программы, реализующей симплекс-метод. Определив значения неизвестных Xij , получаем ответ на вопрос, где и в каком количестве должно проживать население города, где должны размещаться пункты обслуживания, чтобы затраты ресурсов на перемещение людей были минимальными.
Рисунок 3.8 – Размещение котельных
Аналогичным образом решается транспортная задача при размещении районных котельных на генплане городской застройки. Далее приведен пример решения такой задачи с использованием метода минимальной стоимости, заимствованный из работы. Схема расположения котельных и потребителей тепла показана на рис. 3.8.
Расстояния от потребителей тепла до котельных:
Потребности потребителей тепла:
а1 = 4 Гкал/ч; а2 = 3 Гкал/ч; а3 = 6 Гкал/ч; а4 = 2 Гкал/ч; а5 = 5 Гкал/ч.
Требуется определить мощности котельных B1 и B2 при указанном расположении потребителей тепла, обеспечить их теплом с минимальными потерями. Обозначим Xij количество тепла, поставляемое из котельной Bi к потребителю a j (i=1,2; j=1-5). Решение получаем в табличной форме (табл. 3.1).
Под таблицей приведены потребности в тепле всех потребителей.
В ячейках таблицы вначале записываются неизвестные Xij, подлежащие определению, а под ними указывается расстояние lij. Полагая, что потери тепла пропорциональны этому расстоянию, заполнение таблицы значениями Xij производится следующим образом.
В первом столбце тепло к потребителю a можно подать от котельной B1 на расстояние 1,5 км и от котельной B2 на расстояние 4 км. Поставляя тепло на меньшее расстояние, принимаем X11=4 Гкал/ч и X21=0. Стоимость отопления будет при этом меньше за счет уменьшения потерь тепла. Отсюда название метода (наименьшей стоимости).
Таким же образом заполняем остальные столбцы таблицы. После этого определяем мощности котельных, Гкал/ч:
Полученное решение проверим подсчетом целевой функции:
Для решения, приведенного в таблице, значение целевой функции Zо=32,5 Гкал км/ч.
Если все потребители получают тепло от первой котельной, целевая функция Z1=51,5 Гкал км/ч больше Zо на 70 %.
При отоплении всех потребителей от второй котельной Z2=44 Гкал км/ч больше на 30 %.
Таким образом, меняя расположение котельных на генплане городской застройки, можно добиться минимальной стоимости транспортировки тепла к его потребителям. Заметим, что всю вычислительную работу по обоснованию расположения котельных удобно выполнять с использованием электронных таблиц Excel.
4 Занятие № 4. Проектирование объемно-планировочного решения зданий
4.1 Объемно-планировочное решение зданий
В данной работе рассматривается объемно-планировочное решение (ОПР) для промышленного здания из сборных железобетонных элементов. Исходными данными являются площадь здания и нагрузки на покрытие и на междуэтажное перекрытие (для многоэтажных зданий). По площади здания формируется план здания с сеткой колонн с шагом 6 или 12 м и типовыми пролетами несущих конструкций – 6, 9, 12, 18 и 24 м.
Для выбора лучшего варианта ОПР используется автоматизированная информационно-поисковая система (АИПС), в которой для принятого плана здания определяется потребность всех элементов каркаса из числа предлагаемых в базе данных типовых элементов с последующим автоматическим определением общей потребности железобетона на устройство каркаса здания.
На рис. 4.1 приведен план одноэтажного здания с площадью A=1584 м2 с нагрузкой на покрытие q=7 кН/м2. В табл. 4.1 приведены данные подсчета потребности железобетона. Расход железобетона на устройство одного элемента заимствован из работы.
Разделив общий расход железобетона на площадь здания, получим приведенную толщину железобетона на 1 м2 его площади, по которой можно определить лучший вариант объемно-планировочного решения с минимальным расходом железобетона.

Рисунок 4.1 – План одноэтажного здания
Таблица 4.1 – Подсчет потребности в железобетоне
Примечание. Строки 2 и 4 пропущены, поскольку здание одноэтажное. Для зданий с несколькими этажами в этих строках содержатся данные здания для этажей ниже верхнего. Общий объем железобетона для здания составил 330,13 м3, приведенный к единице площади расход железобетона:
В МГСУ разработана программа ВАРТ, с помощью которой делается оценка вариантов ОПР по следующим критериям:
— коэффициенты компоновки здания:
где Aр.п – площадь рабочих помещений;
Aо – общая площадь здания;
Vзд – объем здания;
Aпов – площадь поверхности здания;
— затраты на строительство здания;
— затраты на эксплуатацию здания;
— расход основных строительных материалов;
— трудоемкость возведения здания;
— интенсивность «людских потоков»:
где i = 1, . n – количество помещений в здании;
j = 1, . m – число связей между помещениями; Kij – количество человек в людских потоках;
Zij – расстояние между помещениями.
Лучший вариант ОПР находится либо методом ранжирования критериев, либо методом комплексного критерия с весовыми коэффициентами, заданными для каждого критерия экспертным путем.
Источник: infopedia.su
Топология на пальцах
Топология — довольно красивое, звучное слово, очень популярное в некоторых нематематических кругах, заинтересовало меня еще в 9 классе. Точного представления конечно же я не имел, тем не менее, подозревал, что все завязано на геометрии.
Слова и текст подбирались таким образом, чтобы все было «интуитивно ясно». Как следствие — полное отсутствие математической грамоты.
Что такое топология? Сразу скажу, что есть, по крайней мере, два термина «Топология» — один из них просто обозначает некоторую математическую структуру, второй — несет за собой целую науку. Наука эта заключается в изучение свойств предмета, которые не изменятся при его деформации.
Наглядный пример 1. Чашка бублик.
Мы видим, что кружка непрерывными деформациями переходит в бублик (в простонародье «двухмерный тор»). Было замечено, что топология изучает, то что остается неизменным при таких деформациях. В данном случае неизменным остается количество «дырок» в предмете — она одна. Пока оставим как есть, чуть позже разберемся наверняка)
Наглядный пример 2. Топологический человек.

Непрерывными деформациями человек (см. рисунок) может распутать пальцы — факт. Не сразу очевидно, но можно догадаться. А если же наш топологический человек предусмотрительно надел часы на одну руку, то наша задача станет невыполнимой.
Давайте внесем ясности
Итак, надеюсь парочка примеров привнесла некоторой наглядности к происходящему.
Попробуем формализовать это все по-детски.
Будем считать что мы работаем с пластилиновыми фигурками, и пластилин можем растягивать, сжимать, при этом запрещены склеивания разных точек и разрывы. Гомеоморфными называются фигуры, которые переводятся друг в друга непрерывными деформациями описанными чуть ранее.

Очень полезный случай — сфера с ручками. У сферы может быть 0 ручек — тогда это просто сфера, может быть одна — тогда это бублик (в простонародье «двухмерный тор») и т.д.
Так почему же сфера с ручками — обособляется среди других фигур? Все очень просто — любая фигура гомеоморфна сфере с некоторым количеством ручек. То есть по сути у нас больше ничего нет О_о Любой объемный предмет устроен как сфера с некоторым количеством ручек. Будь то чашка, ложка, вилка (ложка=вилка!), компьютерная мышь, человек.
Вот такая вот достаточно содержательная теорема доказана. Не нами и не сейчас. Точнее она доказана для гораздо более общей ситуации. Поясню: мы ограничивались рассмотрением фигур слепленных из пластилина и без полостей. Это влечет следующие неприятности:
1) мы никак не можем получить неориентируемую поверхность (Бутылка Клейна, Лента Мёбиуса, проективная плоскость),
2)ограничиваемся двухмерными поверхностями (н/п: сфера — двухмерная поверхность),
3)не можем получить поверхности, фигуры простирающиеся на бесконечность (можно конечно такое представить, но никакого пластилина не хватит).
Лента Мёбиуса
Бутылка Клейна

Комментарий: изображено самопересечение, что мы запрещали изначально. На самом деле если рассматривать вложение в четырехмерное пространство, то можно избавиться от самопересечений, но «БолееЧемТрехМерные» пространства — ненаглядны.
Неориентируемые поверхности примечательны тем, что они не разделяют пространство на две части, например т.к. сфера.
Но не все так плохо. А точнее, все так же хорошо как и в ориентируемом случае — любая неориентируемая двухмерная поверхность (правильно так же добавить: компактная, связная, без края) гомеоморфна сфере с некоторым количеством «пленок Мёбиуса») и ручек. К слову Бутылка Клейна — сфера с двумя пленками Мёбиуса.
Промежуточный итог
Мы ознакомились с наипростейшим изложением сути непрерывных отображений (деформаций), неявно сформулировали теорему классификации двухмерных компактных связных поверхностей без края, ознакомились на пальцах с понятием ориентируемости.
Далее будет рассказано о связи топологии с другими разделами математики/механики, постараюсь найти какие-нибудь изюминки.
Источник: habr.com