Вместе с созданием баллистической ракеты конструкторам пришлось заняться разработкой стартового комплекса, способного обеспечить размещение, предстартовую подготовку и пуск ракеты. Со временем стартовый комплекс становился все сложнее и сложнее, но главный его элемент — пусковое устройство, видоизменялось не часто. С совершенствованием ядерного оружия требования, предъявляемые к стартовым системам, стали оказывать заметное влияние на развитие ракет.
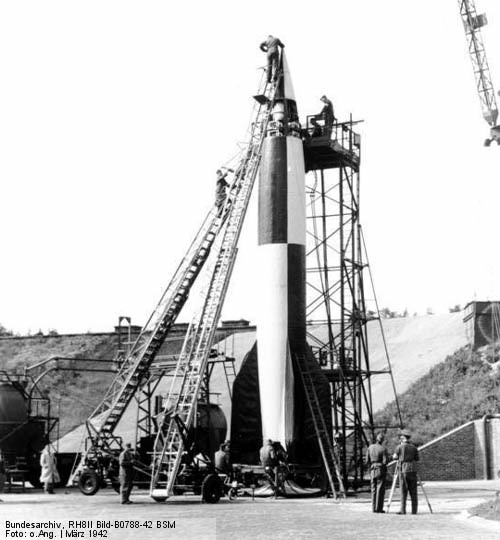
Первым пусковым устройством, применявшимся немецкой армией в годы Второй мировой войны, стал так называемый пусковой стол квадратной формы. Его можно было перевозить с места на место, лишь бы местность по профилю подходила для установки ракеты. Были созданы и активно эксплуатировались в 1944 году стационарные позиции с бетонированными площадками.
Перед стартом ракета А-4 устанавливалась при помощи крана на пусковой стол таким образом, чтобы обеспечить совпадение плоскости стрельбы с плоскостью стабилизации ракеты. После этого вводились данные в автомат управления дальностью. Таким образом проводилось прицеливание ракеты. Далее осуществлялась заправка баков компонентами топлива из автоцистерн.
Ход строительства ЖК «Парковый» — январь 2023 г.
Пусковой сигнал на включение маршевого двигателя передавался по кабелю, проложенному от места размещения пункта управления пуском. Для обеспечения отбоя факела истекающих горячих газов внутренняя часть пускового стола имела пирамидальную форму. Такое пусковое устройство было надежным и простым в производстве, а главное — многоразового использования. Все остальные агрегаты пускового комплекса монтировались на автомобильном шасси.
Наземное пусковое устройство типа пусковой стол не исчезло вместе с ракетой А-4. Его использовали в стартовых комплексах ракет Р-1, Р-2, Р-5М, Р-12, Р-14 (СССР), «Дун-1», «Дун-2» (Китай) и других практически в неизмененном виде, хотя состав агрегатов и систем ракетных комплексов постоянно совершенствовался.
В ряде случаев он потерял мобильность и размещался стационарно на заранее подготовленных в инженерном и геодезическом отношении позициях (Р-14, «Дун-1» и др.). С возрастанием массы и размеров ракет, естественно, увеличивались соответствующие характеристики и пусковых устройств. Так, например, пусковой стол для запуска ракеты Р-12 имел ширину и длину 3,02 м, высоту 3,27 м и массу 6,9 т. Конструкция пускового стола определяется конструкцией ракеты и способами ее наведения и установки. Но в любом случае он состоит из основания, опорно- поворотной части, верхней рамы, газоотражателя, подъемных и поворотных механизмов, уравнительного механизма и закладных частей.
Интересную конструкцию наземного пускового устройства применили для запуска американской БРСД «Тор». Так как комплекс считался мобильным, т. е. способным проводить пуски ракет с неподготовленных, но отвечающих определенным условиям позиций, необходимо было иметь пусковое устройство с небольшим давлением на грунт. С этой целью разработчики сконструировали пусковую установку с откидывающимися в виде лепестков опорами. Такая конструкция нигде больше не применялась.
ТОЧКА РОСЫ. ПОЧЕМУ ВЫПАДАЕТ КОНДЕНСАТ
Пусковой стол использовался для запуска советской МБР Р-16. На стартовой позиции оборудовались две площадки с пусковыми устройствами, пункт управления пуском, подъездные пути, устанавливались в обвалованных укрытиях емкости для хранения компонентов ракетного топлива. Ракеты хранились в бетонированных укрытиях.
В случае необходимости они доставлялись к месту старта на транспортно-установочных тележках. После установки ракеты на пусковой стол проводилась предстартовая подготовка. Р-16 стала последней из поставленных на боевое дежурство межконтинентальных ракет, для запуска которой применялось подобное пусковое устройство.
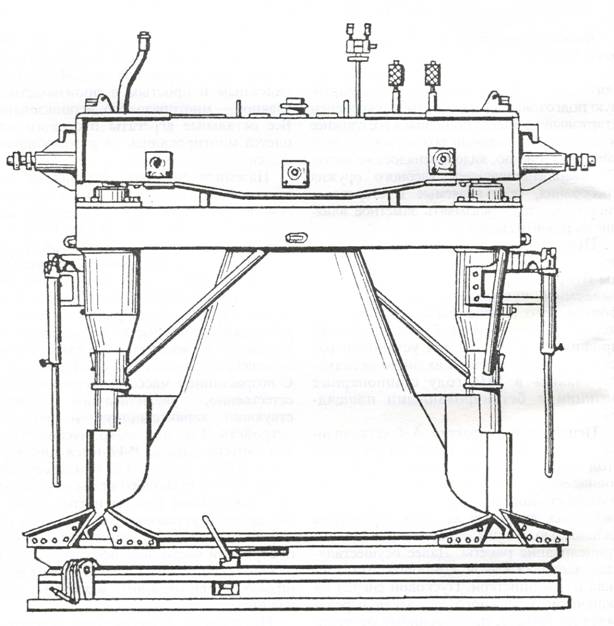
Стационарный стартовый комплекс, созданный для запуска первой советской межконтинентальной ракеты Р-7, имел иную конструкцию. Его вариант для запуска ракет-носителей, выводящих на околоземные орбиты космические аппараты, видели многие в телерепортажах с космодрома Байконур. Так как ракета имела очень большую стартовую массу и солидные размеры, использовать стартовый стол было невозможно. Коллектив конструкторов под руководством Бармина разработал новый проект пускового устройства.
Перевозимый пусковой стол
На бетонированной стартовой позиции размещались комплекс стационарного наземного оборудования, пусковое устройство и другие сооружения, бункер командного пункта, обеспечивавшие подготовку ракеты к старту. Этот процесс длился несколько часов. Ракета Р-7 вывозилась из монтажно-испытательного корпуса, где ее собирали, на транспортно- установочном агрегате и в горизонтальном положении с незаправленными топливными баками доставлялась на стартовую позицию.
Пусковая установка представляла собой металлическую конструкцию, состоящую из неподвижной и подвижной частей. Неподвижная часть, установленная на козырьке пускового сооружения, состояла из двухниточного рельсового кольца, гидропривода с редуктором, приводящим в движение подвижную часть ПУ по кругу, упорных роликов, гидродомкратов со стопорами для фиксации подвижной части относительно неподвижной с заданным углом азимутального разворота. Азимутальное наведение обеспечивало заданное направление полета ракеты по курсу и могло осуществляться разворотом всей ракеты в горизонтальной плоскости с помощью поворотного механизма ПУ или введением соответствующей программы в ее бортовую систему управления, т. е. без разворота корпуса ракеты.
Устройства подвижной части обеспечивали установку, крепление, наведение, заправку и обслуживание ракеты. Она устанавливалась на поворотный круг и выравнивалась по вертикали. На его четырех основаниях шарнирно крепились четыре опорные фермы с несущими стрелами, с секторами и оголовками в верхней части и противовесами в нижней.
При сведении опорных ферм с помощью гидропривода в вертикальное положение сектора образовывали силовое замкнутое кольцо, на оголовках которого подвешивалась и удерживалась ракета до пуска. Ее масса удерживала кольцо в замкнутом состоянии, которое в момент схода ракеты с пусковой установки размыкалось под действием противовесов, и опорные фермы с несущими стрелами отводились от движущейся ракеты на безопасный угол. Чтобы избежать влияния на ракету мощных потоков истекающих горячих газов, под опорным кольцом пришлось отрыть глубокий котлован и оборудовать его пламяотбойниками. МБР устанавливалась на место старта специальным установщиком, сконструированным на железнодорожной платформе.
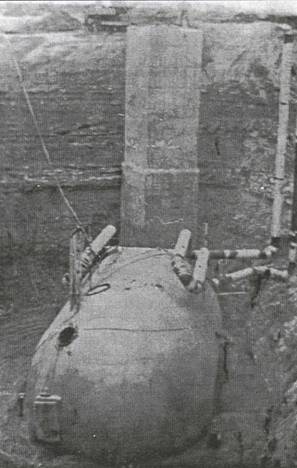
С повышением требований к ракетным комплексам пришлось переходить к новым типам стартов. Возникла идея «спрятать» ракету под землю, что сулило значительное повышение уровня живучести. Первыми стартовый комплекс шахтного типа применили американцы для своих межконтинентальных ракет.
МБР «Атлас-F» размещали на территории ракетной базы, где оборудовалось 12 стартовых позиций с пунктом управления пуском, ракетной шахтой и вспомогательными сооружениями на каждой из них. Стартовые позиции были удалены друг от друга на 10–30 км. Конструкция шахты была рассчитана на избыточное давление во фронте ударной волны 7 кг/см?. По тем временам — величина значительная, так как ракета на пусковом столе выдерживала давление всего 0,2 кг/см?. Шахта имела глубину 53 м и внутренний диаметр 15,6 м. На ее нижнем ярусе размещались два резервуара для хранения запасов жидкого кислорода, три емкости с гелием для наддува топливных баков ракеты и бак с жидким азотом.
Внутри ствола шахты на подвижной люльке монтировался пусковой стол, который мог подниматься на уровень земли при помощи подъемника. Для проведения технического обслуживания ракеты имелось несколько ярусов площадок обслуживания. Сверху шахта закрывалась двухстворчатой железобетонной крышей, имевшей толщину 0,76 м и массу 126 т. Ее открытие осуществлялось гидроприводом.
Ракета хранилась в шахте с заправленными баками горючего. Перед стартом она заправлялась окислителем. Проводилась проверка системы управления и агрегатов ракеты, после чего стартовый стол поднимался на поверхность. Все эти операции длились около 13 минут. На поверхности земли, если по каким-либо причинам пуск задерживался, проводилась подпитка бака с жидким кислородом.
В 30 м от ШПУ оборудовался двухэтажный пункт управления пуском. Его фундамент был заглублен в землю на 11,5 м. Шахта и пункт управления соединялись между собой туннелем, проложенным на глубине 11,5 м и имевшим диаметр 2,4 м. В нем были уложены кабели управления. По своей защищенности стартовая позиция МБР «Атлас» превосходила все существовавшие на тот момент стартовые комплексы, а также позволяла уменьшить потребное время на приведение ракеты в полную боевую готовность, так как исключались из процесса подготовки к старту операции по буксировке и установке ракеты на пусковое устройство.
Конструкторы, создававшие стартовый комплекс для МБР «Титан-1», стремясь повысить его живучесть в ядерной войне, пошли несколько иным путем. Девять ракет размещались на одной ракетной базе, в состав которой входили три стартовые позиции размером 300×300 м. На каждой из них оборудовались три стартовые площадки с ШПУ, пунктом управления пуском, силовой станцией и другими сооружениями. Почти все техническое и технологическое оборудование укрыли в шахтах, которых на каждой стартовой площадке было три. Одна из них служила для размещения ракеты, вторая — для хранения запасов топлива и последняя — для различного оборудования.
Шахтная пусковая установка имела глубину 49 м, максимальный диаметр 13,5 м, который книзу уменьшался. Ее закрывала двухстворчатая железобетонная крыша толщиной 1 м, масса которой достигала 106 т. Для ее открытия установили специальный гидропривод. Внутри шахты на амортизаторах подвешивалась стальная клеть с пусковым столом.
Ракета доставлялась на место старта по ступеням и собиралась непосредственно в шахте. Пусковой стол поднимался и опускался при помощи гидромотора. Перед пуском ракету поднимали на уровень земли.
На расстоянии 12 м от ШПУ располагалась вспомогательная шахта глубиной 12 м и диаметром 12,3 м. В ней разместили емкости горючего и оборудование для заправки ракеты, обеспечивающие заполнение баков за шесть минут. Запас жидкого кислорода хранился в отдельном резервуаре с двойными стенками.
Третья шахта глубиной 21,5 м и диаметром 13 м оборудовалась в 15 м от пусковой установки. В ней на четырех этажах разместили системы, обеспечивавшие функционирование агрегатов ПУ, и контрольно-проверочную аппаратуру. Обе вспомогательные шахты защищались мощной крышей из железобетона толщиной 1,8 м.
Пункт управления пуском оборудовался в подземном двухэтажном помещении под мощным железобетонным куполом, заглубленным на 7 м. В нем нес боевое дежурство расчет и размещалась аппаратура боевого управления, в том числе и ЭВМ «Афина». На удалении 180 м от пункта управления размещались две шахты глубиной 23 м и диаметром 9 м для антенн системы радиоуправления. Перед пуском одна из них поднималась и удерживалась на поверхности.
Силовая станция располагалась в двухэтажном подземном помещении и обеспечивала электропитанием потребителей стартовой позиции. Все сооружения связывались между собой туннелями общей протяженностью около 900 м. По ним осуществлялась прокладка трубопроводов и кабелей различного назначения, а также передвигались люди. Сооружения имели шлюзовые двери, перед которыми оборудовались расширительные камеры размером 4,9×5,3 м. Защищенность подземных сооружений составляла 4–7 кг/см?, а ШПУ — 20 кг/см?. Такие значения для того времени были рекордными.
Чтобы подготовить ракету к пуску, требовалось 15 минут. За это время проводилась заправка компонентами топлива, проверка всех систем и подъем ракеты на поверхность. Выдвигалась антенна управления. Ракеты с одной стартовой позиции могли стартовать только последовательно, с интервалом, определявшимся циклом наведения одной ракеты.
Комплекс получился очень дорогим, что послужило одной из причин уменьшения общего числа заказанных для развертывания на ракетных базах МБР «Титан-1». Использование управляющих РЛС снижало его боевую ценность, так как даже при условии сохранения ракет уничтожение антенн управления не позволяло осуществить прицельный пуск.
Строительство шахтных позиций с групповыми стартами для баллистических ракет стало характерным для советских и американских ракетных комплексов первой половины 60-х годов. Причем американцы шли впереди и задавали тон. Первые ШПУ в Советском Союзе создали для БРСД Р-12, Р-14 и МБР Р-16.
Разработку проектной документации для стартовых позиций с шахтными пусковыми установками осуществлял коллектив конструкторского бюро, возглавляемого В. П. Барминым. Советские конструкторы пошли по несколько иному пути, чем их американские коллеги. Старт ракет предполагалось осуществлять непосредственно из ствола шахты.
При проектировании пришлось решать много сложных технических задач, таких как проходка шахт с применением системы замораживания грунтов, обеспечение заправки ракеты компонентами топлива и газами высокого давления с использованием дистанционного управления и др. В июне 1959 года на полигоне Капустин Яр в спешном порядке начали сооружать опытные ШПУ для ракет Р-12, и несмотря на сложные гидрогеологические условия в этом районе, работы первой очереди удалось закончить в сжатые сроки. Через три месяца после начала строительства — 31 августа 1959 года — был произведен первый пуск.
В 1963 году в западных районах СССР началось строительство и развертывание БРК средней дальности. Для ракет Р-12У на одной позиции по углам прямоугольника с размерами 80х70 м сооружались четыре ШПУ, а для БРСД Р-14У оборудовалось три пусковые шахты по углам прямоугольного треугольника с катетами 80 и 70 м. На каждой позиции имелся защищенный пункт управления пуском. Ракеты загружались в пусковые шахты при помощи установщиков специальной конструкции и хранились с пустыми топливными баками. Перед пуском проводилась предстартовая подготовка, длившаяся около 2 часов. Несмотря на то, что живучесть ракет повысилась, эксплутационные и боевые характеристики этих ракетных комплексов возросли незначительно.
Шахтные позиции с групповыми стартами создавались и для МБР Р-9А. На такой позиции имелось три ШПУ, командный пункт и пункт радиоуправления. Ракеты на боевом дежурстве содержались с заправленными баками горючего. Запас жидкого кислорода содержался в подземных резервуарах, оригинальная конструкция которых позволяла хранить его длительное время с минимальными потерями.
Для наполнения баков окислителем перед стартом была применена скоростная система заправки. Как и ракеты «Титан-1», «девятки» могли быть запущены с одной стартовой позиции поочередно в течение 30 минут.
С повышением точности попадания боевых блоков межконтинентальных ракет возникла потребность изменить способ размещения пусковых установок. Ведь при существовавшем способе базирования МБР сторона, подвергнувшаяся внезапному ядерному нападению, рисковала потерять несколько своих ракет от одного ядерного блока противника, размещенного на ракете, обладавшей более высокой оперативной готовностью и подлетным временем, меньшим, чем необходимо стороне, подвергнувшейся нападению, на то, чтобы нанести ответный удар. В этих условиях решено было размещать пусковые установки так, чтобы обеспечить непоражение одним ядерным боеприпасом две возможные цели, т. е. создать так называемые ПУ ОС (отдельный старт). Конечно, без внедрения новейших технологий осуществить переход на новую систему было бы трудно.
Строительство пункта управления пуском БРК «Минитмен»
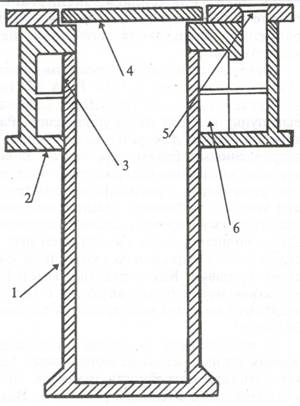
Разрез ШПУ МБР «Минитмен-2»
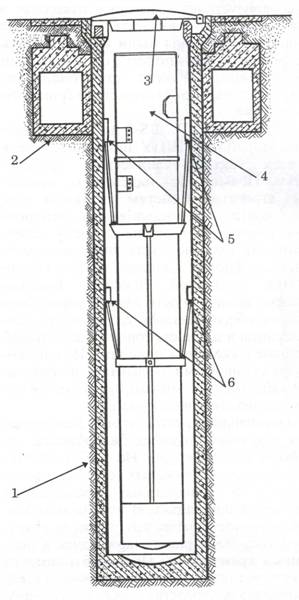
1-«ствол» шахтной конструкции; 2-защитный оголовок шахты; 3-верхний ярус оголовка; 4- защитная крышка шахты; 5-входной люк; 6- нижний ярус оголовка
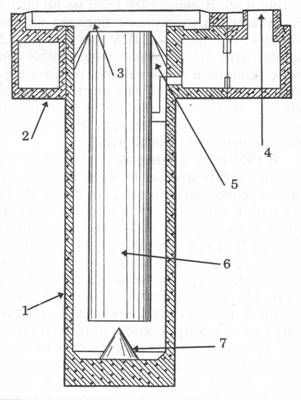
Разрез ШПУ МБР УР-100
1 — «ствол» шахтной конструкции; 2 — защитный оголовок шахты; 3 — защитная крышка шахты; 4 — входной люк; 5 — элементы подвески ТПК; 6 — ТПК с ракетой; 7 — газоотбойное устройство
Американцы, захватившие в начале 60-х годов мировое лидерство в области электроники, первыми создали ШПУ ОС для МБР «Минитмен-1». Для удобства управления была принята отрядная система, при которой на один центр управления пуском приходилось 10 автоматизированных пусковых установок. Командный пункт отряда, оборудованный системами автоматизированного боевого управления и контроля, размещался в подземном защищенном сооружении и связывался заглубленными в землю кабельными линиями связи и электроснабжения с удаленными на 8-20 км от него ракетными шахтами.
ШПУ с ракетами были разнесены на 10–15 км друг от друга. Ракета размешалась в закрытой шахтной конструкции, имевшей защищенность 21 кг/см? и позволявшей проводить техническое обслуживание бортовых систем ракеты. Старт осуществлялся запуском маршевого двигателя первой ступени непосредственно в стволе шахты. Для того чтобы ракета не обгорала, ее внешнюю поверхность покрыли термозащитной краской. Вся стартовая позиция прикрывалась средствами заграждения и автоматизированными системами охраны.
Впоследствии при замене ракет на «Минитмен-2(3)» были внесены некоторые конструктивные изменения. Для отвода излишков тепла от системы управления ракеты установили систему термостатирования. Начиная с 1971 года, в течение 10 лет велись работы по программе VGS, предусматривавшей повышение защищенности всех 1000 ШПУ до 60–70 кг/см?. Существенной модернизации подверглась конструкция шахты, была установлена новая система амортизации, а также осуществлен ряд технических мероприятий, позволивших снизить степень воздействия электромагнитного импульса и проникающей радиации на ракету.
Разрез ШПУ МБР РС-16А
1 — «ствол» шахтной конструкции; 2 — защитный оголовок шахты; 3 — защитная крышка шахты; 4 — ТПК с ракетой; 5 — элементы верхнего пояса амортизации; 6 — элементы нижнего пояса амортизации
Новый стартовый комплекс создали и для МБР «Титан-2». В состав одной ракетной базы входило 18 ШПУ, рассредоточенных друг от друга на расстояние 10–20 км. Они размещались вокруг центра снабжения и командного пункта. Ракетная база занимала район 15–16 тыс. км 2. Стартовая позиция имела размеры 180›‹80 м. На ней оборудовались пусковая шахта и пункт управления пуском.
ШПУ имела глубину 47 м, максимальный внутренний диаметр 16 м и двухслойную конструкцию типа «стакан в стакане» (внешний слой — сталь, внутренний — бетон). Толщина конструкций вверху шахты была значительно больше, чем в нижней ее части. Для отвода горячих газов, истекающих из камер сгорания ЖРД первой ступени при старте ракеты, оборудовались два газоотводящих канала, имевших выход на поверхность. Сверху шахта закрывалась раздвижной крышей массой около 680 т. Ракета устанавливалась на площадке, подвешенной на четырех пружинных амортизаторах.
Трехэтажный пункт управления пуском разместили под мощным бетонным колпаком в толще земли на удалении 75 м от шахтной пусковой установки. На верхнем этаже находились помещения для отдыха личного состава и столовая. На втором этаже устанавливалась аппаратура боевого управления и располагались места операторов. Стартовая позиция обносилась ограждением из кольчужной сетки и оборудовалась средствами автоматизированной системы охраны с дистанционным управлением. Защищенность ШПУ и пункта управления пуском достигала 21 кг/см?.
Со второй половины 60-х годов к строительству шахтных позиций типа ОС приступил и Советский Союз. Все ракетные комплексы второго и третьего поколений имели пусковые установки такого типа. Они, конечно, несколько отличались друг от друга по конструкции, что в первую очередь зависело от выбранного способа старта. В основном применяли два способа старта.
Идея первого заключалась в том, что ракета выбрасывается из шахты специальным аккумулятором давления на безопасную высоту, после чего запускаются двигатели первой ступени (способ «минометного старта»). При втором способе ракета стартует за счет своих маршевых двигателей непосредственно из транспортно-пускового контейнера. Оба этих способа позволяли после проведения необходимых ремонтно-восстановительных работ использовать пусковую установку повторно.
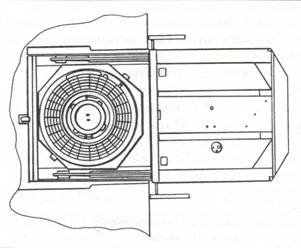
ШПУ УР-100 с открытой защитной крышей
Оригинальную конструкцию пусковой установки разработал коллектив КБ, возглавляемого Уткиным для МБР PC-12. Ракета подвешивалась на системе амортизации над емкостью, в которую наливалось около 2 т специального водяного раствора. При запуске маршевого двигателя первой ступени образовывалось облако газо-водяного пара, которое выталкивало ракету из шахты.
Для того времени и командный пункт этого комплекса по своей конструкции был значительным шагом вперед. Его создали в соответствии с требованиями эргономики, что обеспечило исключительно комфортные условия для работы личного состава боевых расчетов. В середине 60-х годов по степени защищенности он находился на первом месте среди всех командных пунктов такого уровня.
Разработчики французской БРСД S-2 также создали шахтный стартовый комплекс для своей ракеты. До появления РК третьего поколения в СССР и модернизации ПУ «Минитмен» он имел наивысшую степень защиты. Организационно 9 пусковых установок ОС, входящих в состав одного ракетного комплекса, сводились в одну эскадрилью, имевшую свой пункт управления пуском. Всего в боевом составе СЯС Франции имеется две эскадрильи, развернутые на плато Альбион.
Конструкция пусковой установки типовая. Ее глубина 23 м. Внутренний диаметр ствола шахты составляет 4 м. Для повышения устойчивости при колебаниях верхних слоев грунта, вызванных ядерным взрывом, ствол шахты защищался оголовком диаметром 15 м и высотой 14 м, который имел два этажа. В конструкции ШПУ широко применялись бетон и металл.
Сверху шахта закрывалась защитной крышей, имевшей массу 140 т, которая перед пуском открывалась посредством срабатывания специального порохового заряда. Для того чтобы персонал мог попасть вовнутрь, оборудовался люк-лаз. Для удобства обслуживания ракеты и систем пусковой установки имелись откидные и стационарные площадки. Возможные колебания должны были воспринимать устройства групповой и локальной амортизации. Ракета стартовала из шахты за счет собственного маршевого двигателя.
При замене БРСД S-2 на S-3 проводились доработки ШПУ применительно к новым тактико-техническим требованиям. Повышалась надежность некоторых агрегатов и систем, стойкость всей конструкции, устанавливалась нейтронная защита. В настоящее время защищенность пусковой установки по давлению во фронте ударной волны оценивается величиной 50 кг/см?. Высокая степень защищенности пункта управления пуском обеспечивалась удачным его размещением в длинном тоннеле на большой глубине в скальных породах. ПУ с пусковыми установками связывался подземными кабельными линиями, по которым передавались пусковые команды.
Наименьших результатов в деле создания стартовых комплексов добились китайские конструкторы. Их БРСД «Дун-1» запускались с пусковых столов, размещенных на стационарных обвалованных стартовых площадках. В постоянной боевой готовности запас компонентов ракетного топлива и ракеты хранились в подземных хранилищах. При необходимости ракеты устанавливались на пусковой стол, проводилась предстартовая подготовка, длившаяся около 2,5 часов, после чего ракета могла быть запущена. Защищенность этого стартового комплекса составляла 0,2 кг/см?.
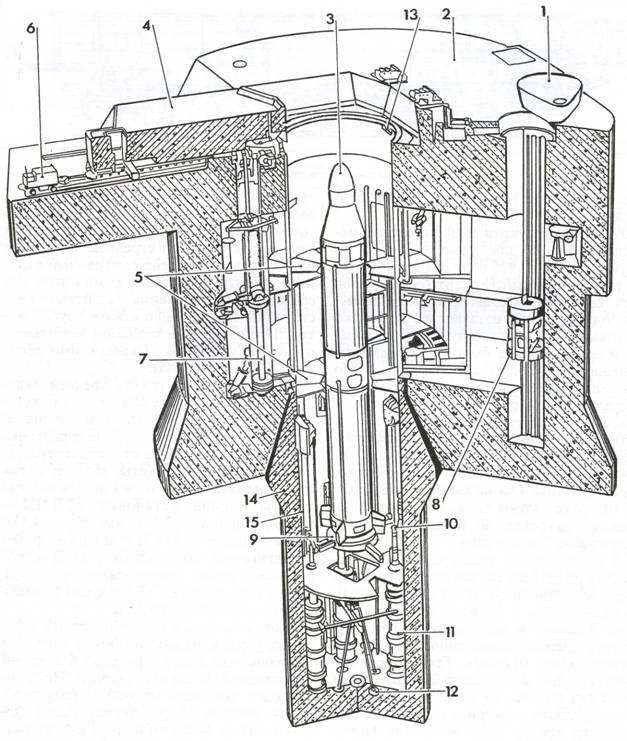
Разрез ШПУ французской БРСД S-2
1 — бетонная защитная крыша входного люка, 2 — восьмиметровый оголовок шахты из высокопрочного бетона, 3 — ракета S-2, 4 — сдвижная защитная крыша шахты, 5 — первый и второй ярусы площадок обслуживания, 6 — устройство открытия защитной крыши, 7 — противовес системы амортизации, 8 — лифт, 9 — поддерживающее кольцо, 10 — механизм натяжки троса подвески ракеты, 11 — пружинная опора системы амортизации, 12 — опора на нижней площадке шахты, 13 — концевые сигнализаторы закрытия защитной крыши, 14 — бетонный ствол шахты, 15 — стальная оболочка ствола шахты.
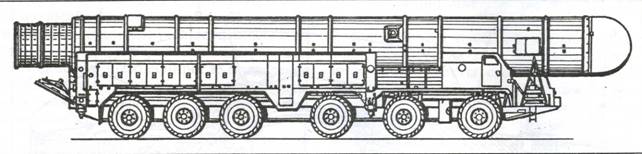
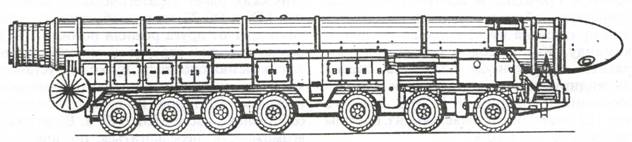
Самоходная пусковая установка БРСД «Пионер»
Такой же тип старта первоначально использовали и для ракет «Дун-2» и «Дун-2-1». Но в 1975 году для первой ввели полумобильный вариант базирования, суть которого сводилась к следующему. Для одной ракеты создавалось несколько стартовых площадок с пусковыми столами и ракету можно было поочередно перемещать с одного старта на другой.
Но так как все перемещения осуществлялись в пределах одной ракетной базы, имевшей довольно ограниченные размеры, то добиться сколь-нибудь заметного увеличения степени защиты не удалось. Не было достигнуто и улучшение эксплуатационных характеристик. Тем не менее, в 1988 году из 105 ракет этого типа, состоявших на боевом дежурстве, 40 использовались в полумобильном варианте.
В середине 80-х годов для первой китайской МБР был создан стартовый комплекс с одиночной шахтной пусковой установкой. Но и он не отличался высокими боевыми и эксплуатационными характеристиками. Защищенность ШПУ составила всего 10 кг/см?.
Техническая готовность ракеты достигала 20 минут, в то время как этот же показатель у современных советских и американских ракет исчисляется несколькими минутами. Невысоким был и показатель надежности комплекса в целом. Следует признать, что для китайской ракетной промышленности и это был заметный прогресс.
Однако законы развития военных систем таковы, что если совершенствуется защита то через определенное время обязательно улучшаются средства нападения. Ядерные боеприпасы баллистических ракет не стали исключением.
Был создан проникающий в землю ядерный заряд, способный поражать высокозащищенные точечные цели, что при одновременном улучшении точности стрельбы поставило под сомнение дальнейшее увеличение степени защиты стартовых комплексов посредством наращивания защитных конструкций. Нужно было искать другой выход. И его нашли в создании мобильных пусковых установок. Первым ими обзавелся Советский Союз.
Баллистическую ракету средней дальности «Пионер», разместили на самоходном шасси МАЗ-547. На том же шасси установили все вспомогательные системы, обеспечивавшие проверку, предстартовую подготовку и пуск ракеты. Но, несмотря на солидную массу и значительные габариты (длина установки с ТПК — 19,3 м, ширина — 3,2 м, высота — 4,4 м, масса — более 80 т) СПУ довольно резво передвигалась по дорогам с любым покрытием, легко преодолевала метровые броды и подъемы до 15 градусов и имела радиус поворота всего 21 м.
Когда создавался этот ракетный комплекс, у его критиков возникло законное опасение: что будет с ракетой и ядерной боеголовкой в случае аварии? Но конструкция оказалась настолько надежной, что в течение 15 лет эксплуатации 509 установок не было ни одного случая разрушения ракеты или боевых блоков даже при тяжелых авариях и катастрофах.
Перед стартом СПУ вывешивалась на гидроопорах, после чего контейнер поднимался в вертикальное положение. Пуск проводился дистанционно по командам с подвижного пункта управления. Ракета выбрасывалась из ТПК пороховым аккумулятором давления на высоту 30 м, после чего включался маршевый двигатель первой ступени.
В процессе ликвидации этих ракет в соответствии с положениями Договора о РСМД было проведено 72 пуска. Все они прошли успешно, подтвердив надежность всех систем ракетного комплекса. Обладая малой технической степенью защиты (0,2 кг/см?), самоходные установки позволяли, тем не менее, при ядерном нападении сохранять часть ракет для ответного удара за счет маневренных качеств.
Но не стоит думать, что они не имели недостатков. Большая масса, зависимость точности стрельбы от точности определения координат точки старта, уязвимость от обычных средств поражения — все это далеко не полный перечень присущих СПУ недостатков. И все же достоинств было больше.
Пусковая установка МБР РС-12М
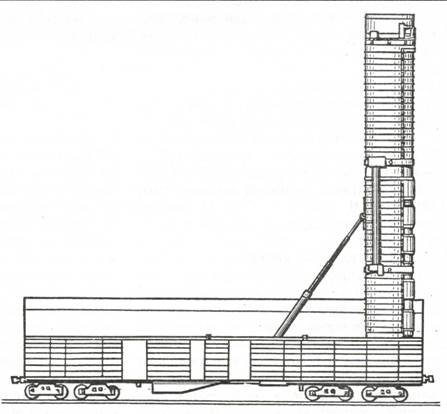
Железнодорожная пусковая установка МБР РС-22Б
Не прошли мимо идеи мобильных пусковых установок и американцы. Ракетный комплекс с БРСД «Першинг-2» также стал мобильным. Ракету поместили на полуприцеп с тягачом фирмы МАН, который с высокой скоростью мог передвигаться по дорогам любой категории.
Длина транспортной пусковой установки составила 9,6 м (длина с тягачом — 15,39 м), ширина — 2,49 м, высота — 2,86 м и масса 12 т. Ракета на ТПУ располагалась открыто, в горизонтальном положении. На полуприцепе устанавливались контейнеры с контрольно-проверочной аппаратурой, а также гидронасосная система, используемая для установки опор и подъема ракеты в вертикальное положение перед стартом. В мирное время все боевые и специальные машины и агрегаты ракетного комплекса находились в боксах. Ракетная бригада, вооруженная БРСД «Першинг-2», как уже отмечалось, дислоцировалась на территории Западной Германии.
Предполагалось, что в военное время ракетные батареи будут выведены в заранее определенные районы и приступят к подготовке ядерного удара. Перед пуском ракеты переводились в боевое положение и подключались кабельными линиями связи к машине- командному пункту, расчет которой проводил и контролировал ход предстартовой подготовки и, по получении приказа на пуск, выдавал пусковую команду. Как и советские «Пионеры», ракеты «Першинг-2» попали в список ликвидируемых в соответствии с положениями Договором об РСМД, для чего все 120 ракет были вывезены из Европы на территорию США.
Мобильные пусковые установки создали и для межконтинентальных ракет. Советскую РС-12М также разместили на самоходном шасси, выполненном на базе тягача МАЗ. При ее создании конструкторы учли богатый опыт эксплуатации ракетного комплекса с БРСД «Пионер», что позволило значительно улучшить боевые и эксплуатационные характеристики, повысить надежность систем и агрегатов пусковой установки. Однако значительная масса ракеты сказалась на скорости движения и проходимости.
И в США и в СССР, при создании близких по своим характеристикам баллистических ракет стратегического назначения MX и РС-22, их разработчики независимо друг от друга решили помимо ШПУ разместить свои изделия на мобильных, но уже железнодорожных, пусковых установках. В пользу этого варианта говорило несколько факторов. Во-первых, солидная собственная масса МБР с РГЧ. Во-вторых, возможность передвигаться по широкой сети железных дорог с гораздо большей скоростью по сравнению с мобильными грунтовыми СПУ, что позволяло выводить из-под удара ракетный комплекс за короткое время и сохранить свои ракеты для ответного удара.
В Советском Союзе БРК с железнодорожными пусковыми установками был принят на вооружение РВСН, а в США после подписания Договора СНВ-1 приостановили доведение такой установки до полной готовности. Видимо, в дальнейшем и политические факторы будут определять пути развития стратегических ракетных комплексов.
Источник: arsenal-info.ru
Местный, ручной, дистанционный пуск системы дымоудаления и подпора
Сколько кнопок управления клапанами и вентиляторами дымоудаления должно быть на объекте?
Местный пуск, ручной пуск, дистанционный пуск — что это все за пуски и какие они должны быть?
Попробую формализовать свой опыт в виде букв, поскольку это вопрос до сих пор не решен однозначно.
Туманность нормативных актов про системы противопожарной защиты.
Вывод о нерешенности вопроса я сделал исходя из состоявшейся в телеграмме дискуссии.
Дискуссия началась с сообщения:
Инспектор пожнадзора при строительстве здания требует установить дополнительные кнопки ручного пуска системы дымоудаления. Ссылается на п. 7.20 СП7. От ручных извещателей АПС его не устраивает.
Если исполнять требование, то придётся городить дополнительную систему, а это трудно и финансово затратно.
В интернете нашёл точь в точь обсуждение на форуме, там даже ссылка на письмо ВНИИПО (с обоснованием зачем это), но в итоге все поворчали, а результат не найден.
Где же правда и логика/норма?
Наверное нужно пойти и почитать этот самый СП 7.13130.2013:
7.20 Управление исполнительными элементами оборудования противодымной вентиляции должно осуществляться в автоматическом (от автоматической пожарной сигнализации или автоматических установок пожаротушения) и дистанционном (с пульта дежурной смены диспетчерского персонала и от кнопок, установленных у эвакуационных выходов с этажей или в пожарных шкафах) режимах.
А вот в статье Дистанционный запуск СОУЭ коллеги приводят другой случай — когда для системы оповещения тоже требуется дистанционный пуск, но кнопки «Дистанционный пуск СОУЭ» нет в природе, а ГУ МЧС и ВНИИПО ничего не могут ответить по существу.
Что такое автоматический пуск системы дымоудаления и подпора воздуха.
Ну с автоматическим пуском системы слава богу все понятно — это пуск при сработке системы авоматической пожарной сигнализации (АПС).
На шкаф управления вентилятором пртивопожарной системы поступает сигнал пуска от АПС по адресной линии связи (АЛС) (если шкаф управления адресный), либо по по линии сигнала пуска противопожарной защиты (СПЗ).
Линия СПЗ должна быть с контролем целостности и выполнена огнестойкой кабельной линией (ОКЛ).
Линия СПЗ регламентируется 22.07.2008 N 123-ФЗ статья 82 и ГОСТ 31565-2012.
Что такое местный ручной пуск системы дымоудаления и подпора воздуха.
ГОСТ Р 53325—2012 гласит:
7.4 Требования назначения к приборам управления
.
д) включение (пуск) исполнительных устройств систем противопожарной защиты раздельно по каждому направлению в ручном режиме следующими способами:
— при помощи органов управления ППУ;
— при помощи элементов дистанционного управления (ЭДУ).
В ППУ должна быть предусмотрена возможность использования обоих способов включения (пуска) исполнительных устройств систем противопожарной защиты раздельно по каждому направлению.
То-есть на панели прибора, который управляет дымоудалением, должны быть кнопки управления «Пуск» и «Стоп» дымоудаления.
В каждом шкафе управления противопожарной системой на дверце шкафа имеются кнопки «Пуск/Стоп».

Это и есть местный пуск противопожарной системы, за которую отвечает шкаф?
Но откроются ли клапана дымоудаления (КДУ) или подпора воздуха (КПВ) при таком пуске шкафа?
Если управление клапанами происходит тоже от этого же шкафа — то все понятно.
А как быть с клапанами, которые управляются при помощи адресных модулей?
Кто-то должен позаботиться чтобы при любом пуске шкафа открылись клапана.
Скорее всего это решаемо, поскольку обязательно должна быть диспетчеризация состояния шкафа, в том числе и пуска шкафа. Эта диспетчеризация наверняка будет выполнена при помощи той же АПС и достаточно будет написать соответствующий сценарий управления: открыть клапана при переходе шкафа в состояние «Пуск».
Что же делать, если АПС не позволяет создать такой сценарий? Тогда нужно будет передать сигнал из АПС назад в АПС при помощи релейных выходов и шлейфов сигнализации. Что-то подобное делали в приборе «Рубеж-2ОП» первого протокола.
Но будет ли такое управление ручным в полном смысле слова?
Букву закона вроде как соблюли.
Но вот дух закона кажется в другом — чтобы система противодымной защиты сработала при простом нажатии кнопки на дверце шкафа если АПС мертва. Но если АПС мертва — клапана не откроются!
Реализовать же на практике хотелку соблюдения духа закона при управлении клапанами от адресного модуля, подключенного к адресной линии АПС вместе с пожарными датчиками — невозможно.
Но дело же не в этом.
Шкаф управления вентилятором дымоудаления не является ППУ (пожарным прибором управления) сам по себе. Более того, шкаф скорее всего будет где-то в венткамере заперт на ключ.
То-есть фраза «при помощи органов управления ППУ» — это вообще не о шкафе управления.
Кнопки запуска и остановки системы дымоудаления должны быть на самом приборе или его компоненте, расположенном в помещении дежурного.
Подробно изучая пожарный прибор «Сигнал-20М» нового исполнения выяснили, что простыми приборами пожарной сигнализации осуществлять управление дымоудалением невозможно именно из-за отсутствия соответствующих кнопок на панели прибора.
Такие кнопки появляются только при использовании сетевых контроллеров, таких как «С2000М» или «Рубеж-2ОП».
Что такое дистанционный ручной пуск системы дымоудаления и подпора воздуха.
Этот вопрос самый сложный и не до конца проработан нормативно. Хотя может и до конца — но производители нашли лазейку.
Ручной пуск на русском языке может означать две вещи:
- Пуск системы руками, минуя все системы автоматизации.
- Пуск системы по желанию человека, а не по сигналу датчика или программе алгоритма.
Правильно ли обычно делают дистанционный ручной пуск системы дымоудаления и подпора воздуха?
Является ли запуск системы дымоудаления от нажатия извещателя пожарного ручного (ИПР) ручным дистанционным пуском?
Именно потому что ответ НЕТ и пишется эта статья.
Нажатие ИПР приводит к возникновению сигнала «Пожар2» в системе АПС и формировании соответствующего сигнала управления. Такой же сигнал управления формируется при сработке двух датчиков дыма.
То-есть это тоже автоматический пуск.
А какой тогда должен быть дистанционный ручной пуск?
Часто можно видеть решение проблемы — рядом с ИПР устанавливается . ИПР, только перекрашенный в другой цвет — желтый.
И обзывается этот ИПР вовсе не ИПР, а устройство дистанционного пуска (УДП).
Прям как в рассказе про то, как после запрета лам накаливания более 100Вт, на лампах накаливания, мощностью более 100 Вт, вместо «лампа» написали «термоизлучатель различного назначения».
Но надо отдать должное — логика работы адресных УДП другая — они не формируют сигнал «Пожар».
Кроме того, при отжатии УДП сигнал «Пуск» снимается сразу — сброс прибора осуществлять не нужно.
Подключаются эти УДП в туже АЛС что и соседний ИПР.



Формально нажатие УДП является ручным дистанционным пуском.
А сточки зрения духа закона?
Наличие двух одинаковых устройств рядом наоборот ухудшает ситуацию, создавая путаницу.
К тому же если АПС не работает, то не работает и УДП.
Возможно я что-то не понимаю, но выглядит как полная глупость.

Давайте рядом еще поставим синий ИПР с надписью «Пуск оповещения», желтый «Пуск пожаротушения» и синий «Разблокирование замков».
Концептуальные проблемы организации ручного дистанционного пуска системы противодымной защиты.
Многие шкафы управления имеют входы для подключения внешних пультов дистанционного управления (ПДУ).
Именно такой пуск и можно в полном смысле считать ручным дистанционным и нам требуется растянуть линию дистанционного (внешнего) ручного пуска на все кнопочные посты на путях эвакуации.
Не очень хочется так делать — да и не имеет смысла так делать.
Разве что установить кнопочные посты в помещении дежурного — это очень даже имело бы смысл.
На следующем фото кнопочные посты систем общеобменной вентиляции, но смысл ясен.

Во первых, такие дополнительные входы есть не на всех сертифицированных шкафах.
Шкафы управления Болид ШКП и Плазма-Т ШУВ имеют только один вход пуска сигналом 24В и он уже задействован для автоматического пуска из АПС.
Использование этого входа еще как-то проблематично, хотя бы из-за наличия контроля целостности уже существующей цепи пуска из АПС.
Во вторых, систем противодымной защиты будет несколько: и что — ставить кучу кнопок везде?
Каким же должен быть ручной дистанционный пуск системы противодымной защиты?
Теперь, после написания этой статьи, понимаю: почему в некоторых проектах адресные линии устройств противопожарной защиты никак не связаны с адресными линиями АПС и подключены к разным сетевым контроллерам.
Казалось бы — зачем дублирование и удвоение проводов в смете?
Хотя, наверное, цель была не в этом следовании духу закона, а в разделении разных систем по разным сметам и подрядчикам.
Встречаются такие проекты, основанные на оборудовании системы Рубеж протокола R3: один прибор «Рубеж-2ОП» предназначен для подключения адресных устройств АПС, другой — для подключения адресных устройств систем дымоудаления, подпора воздуха, управления инженерными системами здания.
И эти несколько приборов «Рубеж-2ОП» дружат по сети RS-485 — они используют одно адресное пространство зон и устройств.
У них все общее, кроме собственных выходов на плате «Рубеж-2ОП» — ими нельзя управлять из другого «Рубеж-2ОП» (по крайней мере так было в 1-м протоколе).
Такая интеграция возможна не в каждой системой безопасности. В вечном споре Болид или Рубеж это будет в копилку преимуществ Рубеж.
Сетевые контроллеры С2000М такое не могут.
Если подобное мутить на оборудовании Болид, то придется сигнал от одного сетевого контроллера С2000М передавать к другому от контактов сигнально-пускового блока «С2000-СП1» на шлейфа прибора «Сигнал-10».
Пуск системы противопожарной защиты с поста дежурного.
Так нужно или нет тащить на пост охраны провода дистанционного пуска от шкафов управления?
Для пущей надежности не помешало бы.
Но в каждой системе безопасности имеется соответствующая панель управления инженерными системами, позволяющая по крайней мере нажатием кнопки включать весь комплекс средств системы.
Дальше всех пошел Рубеж, создав пульт дистанционного управления «Рубеж-ПДУ».
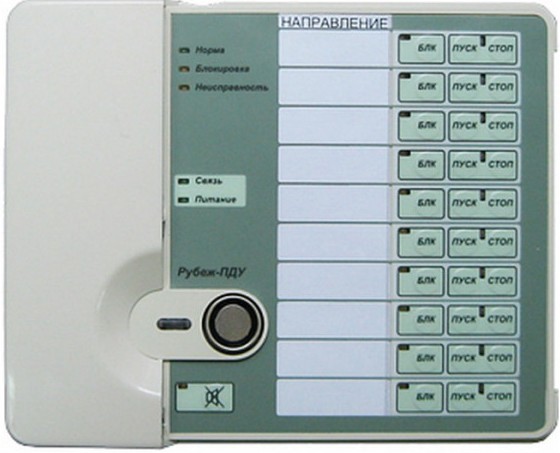
К сожалению редко можно встретить такую панель на объекте.
Стоит она 7500р и эти деньги скорее всего сэкономят.
Все дело в том, что формально управлять всеми выходами и инженерными системами можно и с клавиатуры сетевого контроллера.
Но быть не значит являться — вряд ли какое-либо управление получиться у рядового дежурного персонала.
Источник: fil-tec.ru
Длительность пускового тока электродвигателя
Чтобы генератор служил вам как можно дольше, нужно правильно подобрать его мощность. А чтобы правильно подобрать мощность генератора, необходимо не только учесть номинальные мощности всех потребителей электроэнергии в сети, но и их пусковые токи.
Что же это такое? Официальное определение гласит, что это ток, потребляемый из сети электродвигателем при его пуске, который может во много раз превосходить номинальный ток двигателя. На самом же деле такие токи возникают при включении всех электроприборов, просто у большинства из них они длятся всего несколько миллисекунд, тогда как у электродвигателей это время может достигать 7 секунд.
Не будем вдаваться в подробности изложения причин возникновения пусковых токов. Проведем простую аналогию – каждый автомобилист знает, что при разгоне автомобиль потребляет больше топлива, чем во время движения по трассе с постоянной скоростью. Так же и электродвигатель потребляет больше электричества в момент «разгона». Часто пусковые токи производители ограничивают тем или иным способом, например, с помощью пусковых сопротивлений. Это снижает кратность превышения номинального значения мощности, но увеличивает длительность импульса.
В таблице, приведенной ниже, указаны примерные значения кратности и продолжительности пусковых токов для разных типов потребителей энергии.
| Лампы накаливания | 5 – 13 | 0,05 – 0,3 |
| Электронагревательные приборы из сплавов: нихром, фехраль, хромаль | 1,05 – 1,1 | 0,5 – 30 |
| Люминесцентные лампы с пусковыми устройствами | 1,05 – 1,1 | 0,1 – 0,5 |
| Компьютеры, мониторы, телевизоры и другие приборы с выпрямителем на входе блока питания | 5 – 10 | 0,25 – 0,5 |
| Бытовая электроника, офисная техника и другие приборы с трансформатором на входе блока питания | до 3 | 0,25 – 0,5 |
| Устройства с электродвигателями асинхронного типа, холодильники, насосы, кондиционеры и т.п. | 3 – 7 | 1 – 7 |
Как мы видим из таблицы, пусковым током лампочки запросто можно пренебречь, в то время как про холодильник или кондиционер забывать никак нельзя.
Некоторые электростанции способны выдерживать 5- и даже 7-кратные перегрузки в течение нескольких секунд, однако все равно это не лучшим образом скажется на их сроке службы. Всегда учитывайте запас мощности при выборе электростанции.
Что такое пусковой ток, как его посчитать, увидеть и измерить?
Решил разобраться в теме, про которую написано предостаточно, но суть неясна. Вопрос касается пуска электродвигателей, при котором возникает так называемый пусковой ток.
Итак, сразу к делу. Корень проблемы кроется в том, что для запуска электродвигателя (при подаче питания) требуется гораздо большее усилие, чем для продолжения. Эта физика работает со всеми предметами в мире – ведь начать движение всегда труднее, чем продолжить его.
В статье речь пойдёт об асинхронном электродвигателе с короткозамкнутым ротором, который применяется в промышленном оборудовании в 95% случаев. Питание – трехфазное. Как обычно, по тексту буду отсылать к своим статьям, а в конце можно будет скачать много чего интересного по теме.
Пусковой ток и его кратность
Чтобы тронуть с места (пустить) двигатель, нужен громадный пусковой ток (Iп). Громадный – по сравнению с номинальным (рабочим) током Iн на установившейся скорости. В статьях обычно указывают, что пусковой ток превышает рабочий в 5-8 раз. Это число называется “Кратность пускового тока” и обозначается как коэффициент Кп = Iп / Iн.
Пусковой ток – это ток, который потребляет электродвигатель во время пуска. Узнать пусковой ток можно, зная номинальный ток и коэффициент Кп:
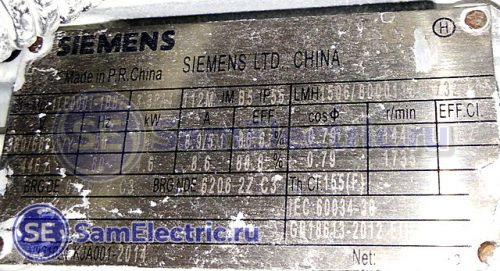
Номинальный ток всегда указан на шильдике двигателя:

Номинальный ток двигателя для разных напряжений и схем включения
Кп – рабочий параметр, который указан в характеристиках двигателя, но на корпусе двигателя он никогда не указывается.
Замечу, что не надо путать номинальный и рабочий токи. Номинальный ток – это ток, на котором двигатель может работать продолжительное время, он ограничен только нагревом обмотки статора. Рабочий ток – это реальный ток в данном агрегате, он всегда меньше либо равен номинальному. На практике рабочий ток измеряется токоизмерительными клещами, амперметром или трансформатором тока.
Если рабочий ток больше номинального – жди беды. Читайте мою статью про то, как защитить электродвигатель от перегрузки и перегрева.
Кратность пускового тока . На шильдике его обычно нет, а в документации и на сайтах производителей он присутствует:
Параметры двигателей. Кратность пускового тока
Пример из первой строчки на картинке: конкретный двигатель мощностью 1,5 кВт имеет номинальный ток 3,4 А. Значит, пусковой ток в какой-то момент (сколько длится этот “момент” – рассмотрим ниже) может достигать значения 3,4 х 6,5 = 22,1 А!
Судя по каталогам (их можно будет скачать в конце статьи, как обычно у меня), пусковой ток превышает номинальный в пределах от 3,5 до 8,5 раз.
Кратность пускового тока зависит прежде всего от мощности двигателя и от количества пар полюсов. Чем меньше мощность, тем меньше пусковой ток. А чем меньше пар полюсов (больше номинальные обороты) – тем больше пусковой ток.
То есть, самым большим током при пуске (7 – 8,5 от номинала) обладают высокооборотистые двигатели (3000 об/мин, 2 пары полюсов) сравнительно большой мощности (более 10 кВт).
Так происходит потому, что потребляемый ток и момент инерции при пуске зависит от конструкции двигателя и способа намотки. Мало полюсов – низкое сопротивление обмоток. Низкое сопротивление – большой ток. Кроме того, высокооборотистым движкам для полной раскрутки требуется больше времени, а это опять же тяжелый пуск.
Если объяснить более научным языком, то дело происходит так. Когда двигатель стоит, его степень скольжения S = 1. При раскручивании (или, как любят говорить спецы, разворачивании) S стремится к нулю, но никогда его не достигает – на то двигатель и называют асинхронным, ведь вращение ротора никогда не догонит вращение поля статора из-за потерь. Одновременно сердечник ротора насыщается магнитным полем, увеличивается ЭДС самоиндукции и индукционное сопротивление. А значит, уменьшается ток.
Кому хочется узнать подробнее – в конце статьи я выложил несколько хороших книг по теме.
На самом деле не так всё просто, начинаем копать глубже.
А что там свежего в группе ВК СамЭлектрик.ру?
Подписывайся, и читай статью дальше:
Как узнать пусковой ток?
Кратность пускового тока (отношение пускового тока к номинальному) найти в документации на двигатель бывает не так-то просто. Но его можно измерить (оценить, узнать) самому. Вот навскидку несколько способов:
- Первый способ (лучший) – использовать осциллограф. Взять шунт (например, резистор 0,1…0,5 Ом, чем меньше по сравнению с обмотками, тем лучше), и посмотреть на нём осциллограмму в момент пуска. Далее из максимального амплитудного значения определяем действующее напряжение (поделить на корень из 2), далее по закону Ома считаем пусковой ток. Можно ничего не умножать и не делить – просто измерить клещами ток в рабочем режиме, и умножить его на разницу токов на экране осциллографа. Способ хорош тем, что видно переходные процессы, вызванные ЭДС самоиндукции, мгновенные значения тока, длительность разгона. Кроме того, учитываются параметры питающей сети. Ещё плюс – пусковой ток измеряется реальный, на реальном двигателе и механизме.
- Второй способ измерения пускового тока – подать на двигатель пониженное (в 5-10 раз) напряжение рабочей частоты и измерить ток. Почему пониженное? Это необходимо для того, чтобы ротор можно было легко зафиксировать, не допуская перегрева. Измеренный ток пересчитать, получим пусковой. Достаточно измерить ток на одной фазе. По другим токи будут (обязаны быть) такими же. Этот способ используют при производстве и испытаниях двигателей. Именно этим способом производители получают табличные данные. Способ опирается на номинальный ток, в реальности (на реальном механизме) пусковой ток может быть другим!
- Измерить пусковой ток токоизмерительными клещами. Плюс этого способа – простота и оперативность. Клещи используют в большинстве случаев для проверки режимов работы двигателей. Минус – такие клещи достаточно инерционны, а нам нужно увидеть, что происходит за доли секунды. Но этот минус нивелируется, когда мы измеряем ток при пуске нагрузки с высоким моментом инерции (вентиляторы, насосы с массивными крыльчатками). Пуск длится более 10 сек, и на экране клещей всё видно.
- Трансформатор тока. Такой используется, например, в узлах учета электроэнергии – благодаря трансформатору тока нет необходимости измерять реальной ток, а можно измерить ток, уменьшенный в точно известное количество раз. Так же измеряют ток в электронных пусковых устройствах (преобразователях частоты, софтстартерах). Минус способа – трансформатор тока рассчитан на частоту 50/60 Гц, а переходные процессы во время пуска имеют широкий спектр и много гармоник. Поэтому можно сказать, что такой способ тоже обладает высокой инерционностью.
Конечно, реальность отличается от эксперимента. Прежде всего тем, что ток короткого замыкания реальной сети питания не бесконечен. То есть, провода, питающие двигатель, имеют сопротивление, на котором в момент пуска падает напряжение (иногда – до 50%). Из-за этого ограничения реальный пусковой ток будет меньше, а разгон – длительнее. Поэтому нужно понимать, что значение кратности пускового тока, указанное производителем, в реальности всегда будет меньше.

Для чего нужны двигатели – приводить в действие механизмы и получать прибыль!
Теперь разберём другой вопрос –
Какой вред от пускового тока?
Пусковой ток – это проблема. Это –
- перегрузка питающей сети, приводящая к нагреву (вплоть до отгорания контактов) и проседанию напряжения;
- чрезмерный износ, перегрузка и перегрев двигателя, у некоторых производителей среди параметров двигателя указывается максимальное количество пусков в час или в сутки – именно из-за перегрева;
- износ и перегрузка механического привода (подшипники, редукторы, ремни), особенно обладающего большим моментом инерции,
- помехи, вызванные включением контакторов, которые передаются не только по проводам, но и через электромагнитное поле,
- проблемы с технологией – многие процессы нельзя начинать резко.
От пускового тока перегружается всё, и момент пуска становится в тягость вcем участникам процесса. Именно в этот критический момент может проявиться “слабое звено”. Кроме того, многие участники электропитания, работающие в этой сети, испытывают проблемы – например, лампочки снижают яркость из-за снижения напряжения, а контроллеры могут зависнуть из-за мощной помехи.
И в то же время пусковой ток – это проблема, от которой никуда не деться, если сразу подавать на двигатель номинальное питание и не использовать специальные методы.
Как уменьшить пусковой ток асинхронного двигателя
Решить проблему большого пускового тока электрически можно двумя путями:
- Вначале подавать на двигатель пониженное напряжение, а затем, по мере разгона, напряжение и скорость вращения поднять до номинального значения. Такой способ применяется в электронных устройствах запуска двигателей – софтстартерах (УПП) и преобразователях частоты (частотниках).
- Использовать ограничители пускового тока, когда при пуске двигатель питается через мощные резисторы, а потом по таймеру переключается на номинал. Сопротивление резисторов соизмеримо с сопротивлением обмотки стартера (единицы Ом, в зависимости от мощности). Это устройство легко сделать самому (контактор + реле времени).
- Сразу подавать полное напряжение, но сначала подключать обмотки так хитро, чтобы двигатель не раскручивался на полную мощность. И только когда в этом режиме двигатель раскрутится насколько это возможно, включать его на полную. Эта схема называется “Звезда – Треугольник”, читайте в следующей статье.
Можно сконструировать какую-то муфту, коробку передач, вариатор – для того чтобы раскрутить двигатель вхолостую, а потом подключить потребителя механического момента.
В современном оборудовании двигатели мощнее 2,2 кВт практически никогда напрямую не включают, поэтому для них пусковые токи рояли не играют. Для уменьшения пускового тока (и не только) в основном применяют преобразователи частоты, о которых будут отдельные статьи.
Как снизить вред от пускового тока?
Если изменить схему питания двигателя невозможно (например, сосед по даче каждые пол часа запускает токарный станок, а никакие “методы воздействия” не воздействуют), то можно применить различные методы минимизации вреда от пусковых токов. Например:
- На важные потребители или на весь дом установить инверторный ИБП (UPS), который будет держать напряжение в норме при любом раскладе. Самый дорогой, но действенный способ.
- Поставить стабилизатор напряжения. Но учтите, что не все стабилизаторы одинаково полезны. Иногда они могут не справляться, а иногда – даже усугублять ситуацию. Подробнее – по приведенной ссылке.
- Если питание – однофазное, то можно попробовать переключиться с “плохой” фазы на “хорошую”. Иногда этот способ так же эффективен, как использование телепорта вместо автобуса “Таганрог-Москва”.
Но напоминаю, что мы тут занимаемся не устранением последствий, а предотвращением проблем, поэтому погнали дальше.
Время действия и величина пускового тока
Длительностью пускового тока будем считать время, в течение которого ток понижается от максимума (Iп) до номинала (Iн). Эта длительность фактически равна времени разгона от нуля до номинальной скорости вращения.
Весь вопрос в том, какова длительность этого тока – 10 миллисекунд (пол периода), когда двигатель на холостом ходу, или 10 секунд, когда на валу массивная крыльчатка. Теоретически рассчитать это время невозможно. Однако, поделюсь некоторыми соображениями.
Как я говорил выше, ток двигателя при пуске может превышать норму в несколько раз (Кп). И некоторые начинающие электрики, которые не читают мой блог, считают, что защитный автомат нужно выбирать так же – на повышенный ток. В статьях и даже инструкциях пишут, что “При выборе автомата необходимо учитывать, что пусковой ток асинхронного электродвигателя в 5 – 7 раз превышает номинальный”. Как это учитывать? Неужели ток автомата выбирать в 5-7 раз выше номинального тока двигателя?

Шильдик китайского электродвигателя 30 кВт
Написано – 56 А. Что это значит? Неужели то, что ток защитного автомата должен быть более 300 А? Конечно, нет. И выбор автомата в данном случае зависит не только от номинального тока двигателя (56 А), но и от времени действия пускового тока.
Кстати, давайте проведём расследование и узнаем пусковой ток этого двигателя. Ведь на сайт этого китайского производителя нам попасть не суждено. Исходные номинальные данные: мощность – 30 кВт, момент – 190,9 N·m, ток – 56 А. Смотрим по каталогам отечественных производителей, ищем подобный двигатель, ведь законы физики одинаковы и в России, и в Китае. Находим (каталог в конце статьи): это двигатель на 1500 оборотов, 4 полюса, с кратностью пускового тока Кп = 7. В итоге получаем: Iп = Iн · Кп = 56 · 7 = 392 А. Это теоретический пусковой ток, но это не ток уставки автомата!
Пусковой ток является максимально возможным током. Максимальным ток будет при пуске, то есть тогда, когда двигатель стоит. То есть, пусковой ток есть ВСЕГДА, и всегда его начальное значение имеет запредельную величину. В случае с нашим китайским движком – 392 А, если принять ток КЗ питающей сети равным бесконечности (источник напряжения с нулевым внутренним сопротивлением).
Тепловое действие пускового тока
Если перейти к формулам, пусковой ток оказывает тепловое действие на электродвигатель, которое описывается так называемым интегралом Джоуля. Если по простому, то тепловая энергия, производимая электрическим током, пропорциональна квадрату тока, умноженному на время. Обозначается эта величина через I2t.
Хорошая новость в том, что защитный автомат имеет примерно такую же тепловую (время-токовую) характеристику, что и время-токовая характеристика разгона двигателя.
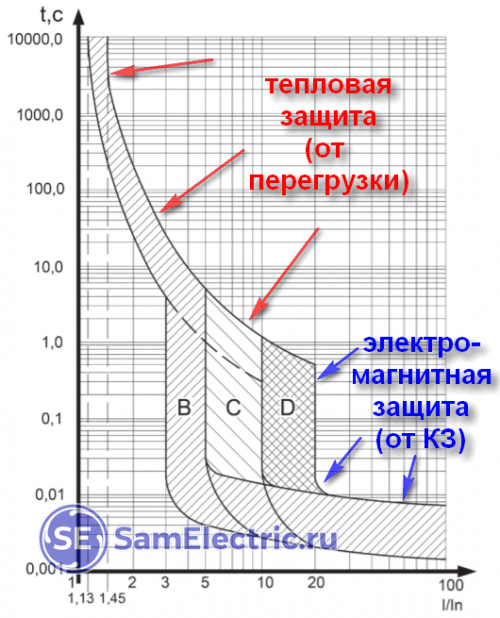
Время-токовые характеристики защитного автомата
Что видим? Для защиты двигателя используются в основном автоматы с характеристикой D, как раз для того, чтобы меньше реагировать на кратковременные перегрузки. Подробнее здесь.
А для пускового тока двигателя график будет примерно такой:
График пускового тока (теоретический) при Кп = 6
Линейность графика – условная. Всё зависит от изменения момента нагрузки в процессе разгона. Теоретический график показан пунктиром. На этом графике Кп = Iп / Iн = 6, но это теоретическое (табличное) значение. Время разгона до номинала = tп.
Реальный график начерчен сплошной линией. На нём Iп` – это реальное значение пускового тока, которое всегда меньше теоретического. Это обусловлено тем, что питающая сеть имеет не нулевое сопротивление, и при повышении тока на проводах возникают потери напряжения.
Про потери на низком напряжении я писал тут, про потери в сетях 0,4 кВ – здесь.
Понятно, что из-за потерь время разгона будет больше, оно обозначено на графике через tп`.
Теперь повернём последний график, чтобы привести оси к одной системе координат:
Время от тока, если можно так выразиться
Не правда ли, весьма похоже на время-токовую характеристику защитного мотор-автомата?
Получается, что обе характеристики компенсируют друг друга, и при выборе автомата достаточно настроить его уставку на номинальный ток двигателя. При особо тяжелых пусках, когда площадь под кривой пуска двигателя больше площади под кривой защитного автомата, стоит подумать о плавном пуске – УПП либо ПЧ.
Реальные измерения тока
Как я говорил выше, по моему мнению лучший способ “увидеть” пусковой ток – использовать активный (резистивный) шунт, и смотреть на нём напряжение осциллографом.
Я использовать вот такой шунт:

Шунт для измерения пускового тока при помощи осциллографа
Подопытный – мотор-редуктор, который через цепную передачу крутит вертикальный шнек:

Мотор-редуктор, на котором измеряем пусковой ток
Шнек на момент пуска был полным, поэтому его рабочий ток (7,7 А, измерено клещами) был почти равен номинальному (8,9 А, видно на шильдике).
Шильдик двигателя вертикального шнека
Ситуация по пусковому току видна на осциллографе:

Осциллограмма пускового тока 500 мс/дел
Приблизим интересующий момент, ускорив развертку до 100 мс/дел:
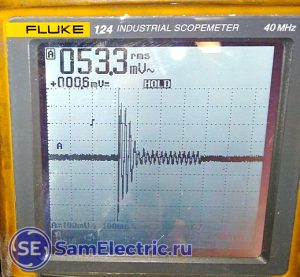
Осциллограмма пускового тока 100 мс/дел
Тут уже легко увидеть синус питающего тока и оценить коэффициент кратности пускового тока Кп, который примерно равен 4.
Ещё приблизим момент истины (до 50 мс/дел):

Момент пуска двигателя – ток пуска
Тут уже видны хорошо и переходные процессы, обусловленные индуктивностью и ЭДС самоиндукции обмоток двигателя. Этот импульс, длительность которого гораздо меньше периода сети 20 мс, даёт хорошую помеху с широким спектром в питающую сеть и радиоэфир.
Ещё один повод для использования ПЧ? Не совсем, там с помехами ситуация гораздо хуже!
Скачать
Надеюсь, читатели простят мне вольное объяснение процессов – я постарался всё объяснить “на пальцах”. Кому нужны академические знания, пожалуйста:
• В.Л.Лихачев. Асинхронные электродвигатели. 2002 г. / Книга представляет собой справочник, в котором подробно описано устройство, принцип работы и характеристики асинхронных электродвигателей. Приводятся справочные данные на двигатели прошлых лет выпуска и современные. Описываются электронные пусковые устройства (инверторы), электроприводы., djvu, 3.73 MB, скачан:3284 раз./
• Беспалов, Котеленец – Электрические машины / Рассмотрены трансформаторы и электрические машины, используемые в современной технике. Показана их решающая роль в генерации, распределении, преобразовании и утилизации электрической энергии. Даны основы теории, характеристики, режимы работы, примеры конструкций и применения электрических генераторов, трансформаторов и двигателей., pdf, 16.82 MB, скачан:75 раз./
• Каталог двигателей Электромаш / Асинхронные электродвигатели с короткозамкнутым ротором – каталог производителя, pdf, 3.13 MB, скачан:44 раз./
• Каталог двигателей ВЭМЗ / Параметры и каталог двигателей, pdf, 3.53 MB, скачан:38 раз./
• Дьяков В.И. Типовые расчеты по электрооборудованию / Практические расчеты по электрооборудованию, теоретические сведения, методики расчета, примеры и справочные данные., zip, 1.53 MB, скачан:104 раз./
• Карпов Ф.Ф. Как проверить возможность подключения нескольких двигателей к электрической сети / В брошюре приведен расчет электрической сети на колебание напряжения при пуске и самозапуске асинхронных двигателей с коротко- замкнутым ротором и синхронных двигателей с асинхронным пуском. Рассмотрены условия, при которых допустим пуск и самозапуск двигателей. Изложение методов расчета иллюстрируется числовыми примерами. Брошюра предназначена для квалифицированных электромонтеров в качестве пособия при вы- боре типа электродвигателей, присоединяемых к коммунальной или промышленной электросети., zip, 1.9 MB, скачан:46 раз./
• Руководство по эксплуатации асинхронных двигателей / Настоящее руководство содержит наиболее важные указания по транспортировке, приемке, хранению, монтажу, пусконаладке, эксплуатации, техническому обслуживанию, поиску неисправностей и их устранению для электродвигателей производства «Электромашина». Руководство по эксплуатации предназначено для трехфазных асинхронных электродвигателей низкого и высокого напряжений серий А, АИР, МТН, МТКН, 4МТМ, 4МТКМ, ДА304, А4., pdf, 7.54 MB, скачан:77 раз./
В паспорте электрического двигателя указывается ток при номинальной нагрузке на валу, он меньше пускового тока. Если отмечено 13,8/8 А, то это значит, что при подсоединении двигателя к сети 220 В и номинальной нагрузке ток двигателя будет равен 13,8 А. При подсоединении к сети 380 В – ток 8 А, таким образом верно равенство мощностей: √3 х 380 х 8 = √3 х 220 х 13,8.
Зная номинальную мощность двигателя определяют его номинальный ток. При включении двигателя в трехфазную распредсеть 380 В номинальный ток рассчитывается следующим образом:
Iн = Pн/(√3Uн х сosφ), кА
где Pн – номинальная мощность двигателя, кВт, Uн – напряжение в сети, кВ (0,38 кВ). Коэффициент мощности (сosφ) – паспортные значения двигателя.

Рис. 1. Паспорт электрического двигателя.
Если не известен коэффициент мощности двигателя, то номинальный его ток с малой погрешностью определяется по отношению «два ампера на киловатт», т.е. если номинальная мощность двигателя 10 кВт, то потребляемый им из сети ток будет приблизительно равен 20 А.
Для упомянутого на рисунке двигателя это отношение также выполняется (3,4 А ≈ 2 х 1,5). Более верные величины тока при применении данного отношения получаются при мощностях электродвигателей от 3 кВт.
При холостом ходе электродвигателя из сети потребляется маленький ток (ток холостого хода). При увеличении нагрузки увеличивается и ток. С увеличением тока повышается нагрев обмоток. Большая перегрузка приводит к перегреву обмоток двигателя, и возникает опасность выхода из строя электродвигателя.
При пуске из сети электрическим двигателем потребляется пусковой ток Iпуск, который в 3 – 8 раз выше номинального. Характеристика изменения тока представлена на графике (рис. 2, а).

Рис. 2. Характеристика изменения тока, потребляемого электродвигателем из сети (а), и влияние большого тока на колебания напряжения в сети (б)
Подлинную величину пускового тока для электродвигателя определяют зная величину кратности пускового тока – Iпуск/Iном. Кратность пускового тока – техническая характеристика двигателя, ее известна из каталогов. Пусковой ток рассчитывается согласно формуле: I пуск = Iх. х (Iпуск/Iном).
Понимание истинной величины пускового тока необходимо для подбора плавких предохранителей, проверки включения электромагнитных расцепителей во время пуска двигателя, при подборе автоматических выключателей и для высчитывания величины падения напряжения в сети при пуске.
Большой пусковой ток вызывает значительное падение напряжения в сети (рис. 2, б).
Если взять электросопротивление проводов, проложенных от источника до электродвигателя, равным 0,5 Ом, номинальный ток Iн=15 А, а пусковой ток Iп равным пятикратному от номинального, потери напряжения в проводах во время пуска составят 0,5 х 75 + 0,5 х 75 = 75 В.
На клеммах электродвигателя, а также и на клеммах рядом работающих электродвигателей напряжение будет 220 – 75 = 145 В. Это понижение напряжения вызывает торможение работающих электродвигателей, что влечет за собой еще большее повышение тока в сети и выход из строя предохранителей.
В электрических лампах в моменты запуска электродвигателей уменьшается накал (лампы «мигают»). Поэтому при включении электродвигателей стремятся уменьшить пусковые токи.
Для понижения пускового тока используется схема пуска электродвигателя с переключением обмоток статора со звезды на треугольник.

Рис. 3. Схема пуска электрического электродвигателя с переключением обмоток статора со звезды на треугольник.
Имеет принципиальное значение то, что далеко не каждый двигатель возможно включать по этой схеме. Широко распространенные асинхронные двигатели с рабочим напряжением 220/380 В, в том числе и двигатель, показанный на рисунке 1 при включении по этой схеме выйдут из строя.
Для понижения пускового тока электродвигателей энергично употребляют специальные процессорные устройства плавного пуска (софт-стартеры).
Источник: vmeste-masterim.ru
Незаметные сложности ракетной техники: Часть 5. Стартовые сооружения

Стартовые сооружения — это отдельный интересный аспект космической техники. В самом деле, ракету надо собрать, вывезти на стартовый стол, ещё раз проверить, заправить, посадить экипаж (если пуск пилотируемый) и запустить. И каждая из задач бросает вызов инженерной сообразительности, материаловедению, сопромату и множеству других дисциплин.
Введение
Для того, чтобы было понятно, о чем идет речь, необходимо объяснить используемые термины и рассказать в общем, как происходит пуск ракеты-носителя.
Прежде всего, ракету-носитель и полезную нагрузку доставляют на космодром. Ракета-носитель практически всегда доставляется в разобранном виде, потому что так её проще перевозить.
Затем ракету и полезную нагрузку собирают в одно целое и проверяют в специальном здании, которое для разных ракет в разных странах имеет множество различных названий: МИК (монтажно-испытательный комплекс), техническая позиция, технический комплекс, VAB (Vertical Assembly Building, здание вертикальной сборки), assembly building (здание сборки) и т.п. Затем ракета-носитель, обычно в сборе вместе с полезной нагрузкой, транспортируется на специальную площадку, с которой происходит пуск. Эта площадка имеет также множество названий — стартовый комплекс, стартовый стол, стартовое сооружение и т.п. Ракета, поставленная вертикально, весьма высокая штука, поэтому обычно есть т.н. башня обслуживания, которая позволяет добраться до нужных мест на уже установленной ракете.
Когда ракеты были маленькими
Чем меньше ракета, тем проще стартовый комплекс и меньше трудностей с ним. На заре ракетостроения весь стартовый комплекс состоял из ровной бетонной площадки, опоры для ракеты на небольших ножках и простенькой башни обслуживания:
Фау-2 и приставные лестницы.
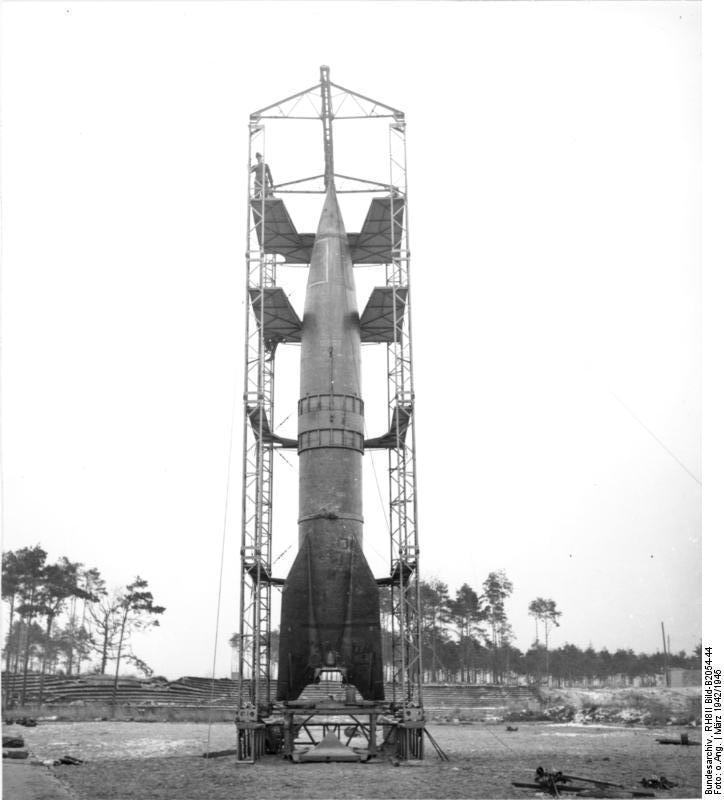
Более продвинутый вариант башни обслуживания. Конус внизу установлен для равномерного выброса газов в стороны.

Даже на пилотируемых пусках со стартовыми комплексами небольших ракет не было особых сложностей:
1961 год, первая пилотируемая миссия программы «Меркурий» — «Mercury-Redstone 3». Башня движется на рельсах, технология аналогична строительному крану. Под стартовой опорой виден такой же конус для равномерного рассеивания газов.
В принципе, для небольших ракет такой подход жив и сегодня. Небольшая стартовая масса означает сравнительно небольшую мощность двигателя и отсутствие проблем с отведением газов, сравнительно короткое воздействие высокой температуры, что снижает требования к материалам.
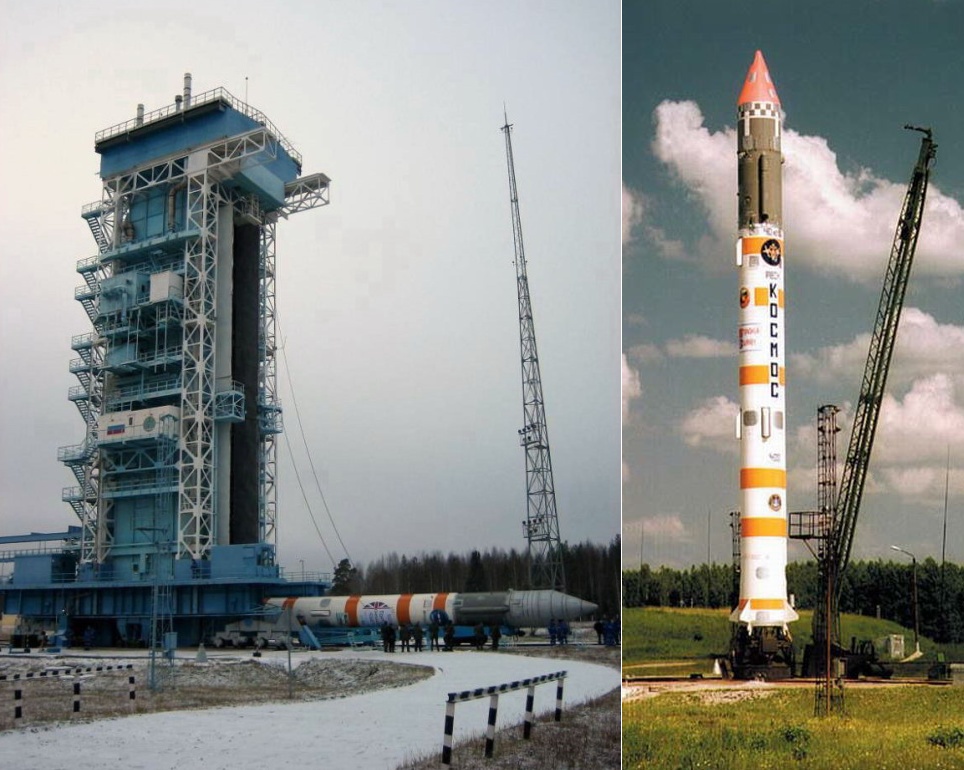
РН «Космос-3М», совсем недавно снята с эксплуатации. Слева видна башня обслуживания, справа — простой стартовый стол.

На Западе примерно то же самое — небольшую ракету можно поставить на старт промышленным автокраном:
Слева Taurus, справа Minotaur V.

И пускать с более высокого, но всё равно простого стартового сооружения:
Слева Taurus, справа Minotaur V.
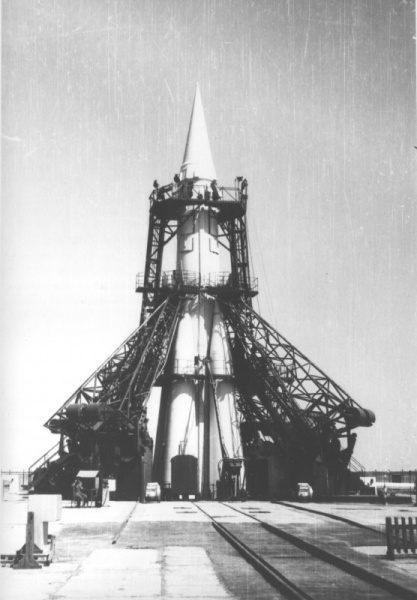
Как расцветал тюльпан
Наверное, самый необычный стартовый комплекс — у семейства ракет «Р-7». Во-первых, это единственный комплекс, в котором ракета не стоит на столе, а подвешена за середину. Во-вторых, в ранних версиях стартовый стол поворачивается целиком перед запуском. Ну и в-третьих, вместо башни обслуживания сделаны две «полубашни», которые, к тому же, отходят от ракеты поворотом в вертикальной плоскости. Почему были приняты такие решения?
Решение по первому пункту очень хорошо описано у Б.Е. Чертока. У ракет семейства Р-7 первая и вторая ступени собраны в пакет. И этот пакет очень плохо устанавливался на стартовый стол — требовалось серьезное усиление хвостового отсека, а это лишний вес, и возрастало ветровое сопротивление. Даже были идеи построить стену вокруг старта.
Эскиз транспортного устройства, которое вывозило ракету и ставило на четыре стартовых стола, по одному для каждого бокового блока, тоже никого не воодушевлял. И тут возникла очень красивая инженерная идея. В полёте усилия боковых блоков передаются на центральный блок через их верхние части. Так почему бы не подвесить ракету на старте за эти же самые силовые узлы?
В этом случае ракета на старте испытывает те же нагрузки, что и в полёте, и не надо специальных мер по усилению конструкции. А погружение ракеты внутрь стартового сооружения решает проблемы с ветровой нагрузкой.
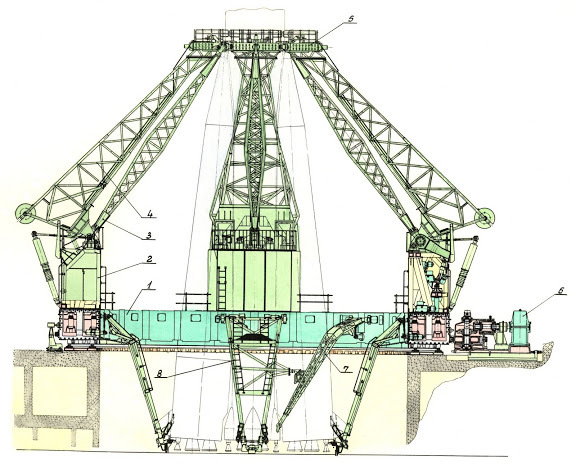
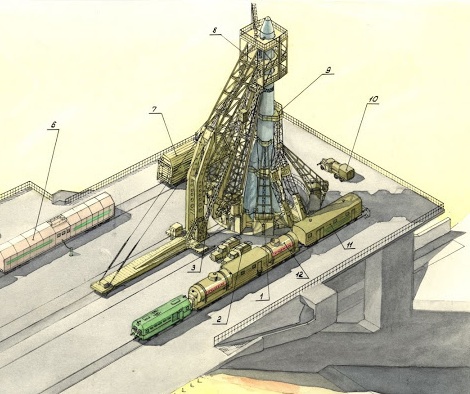
Схема стартового стола. В самом низу есть ещё выдвижной стол для доступа персонала, здесь не показан.

Пункт два исходил из задачи облегчения работы системе управления. В то время развернуть ракету вместе со стартовым столом перед пуском было проще, чем настраивать разворот после старта для аналоговой системы управления. Сейчас, в век компьютеров, это уже анахронизм. На Байконуре столы умеют поворачиваться, и это используют, как доставшееся в наследство, а на новых стартовых комплексах (Куру, Восточный) столы уже без поворотных устройств.
Фото стартового сооружения в Куру.
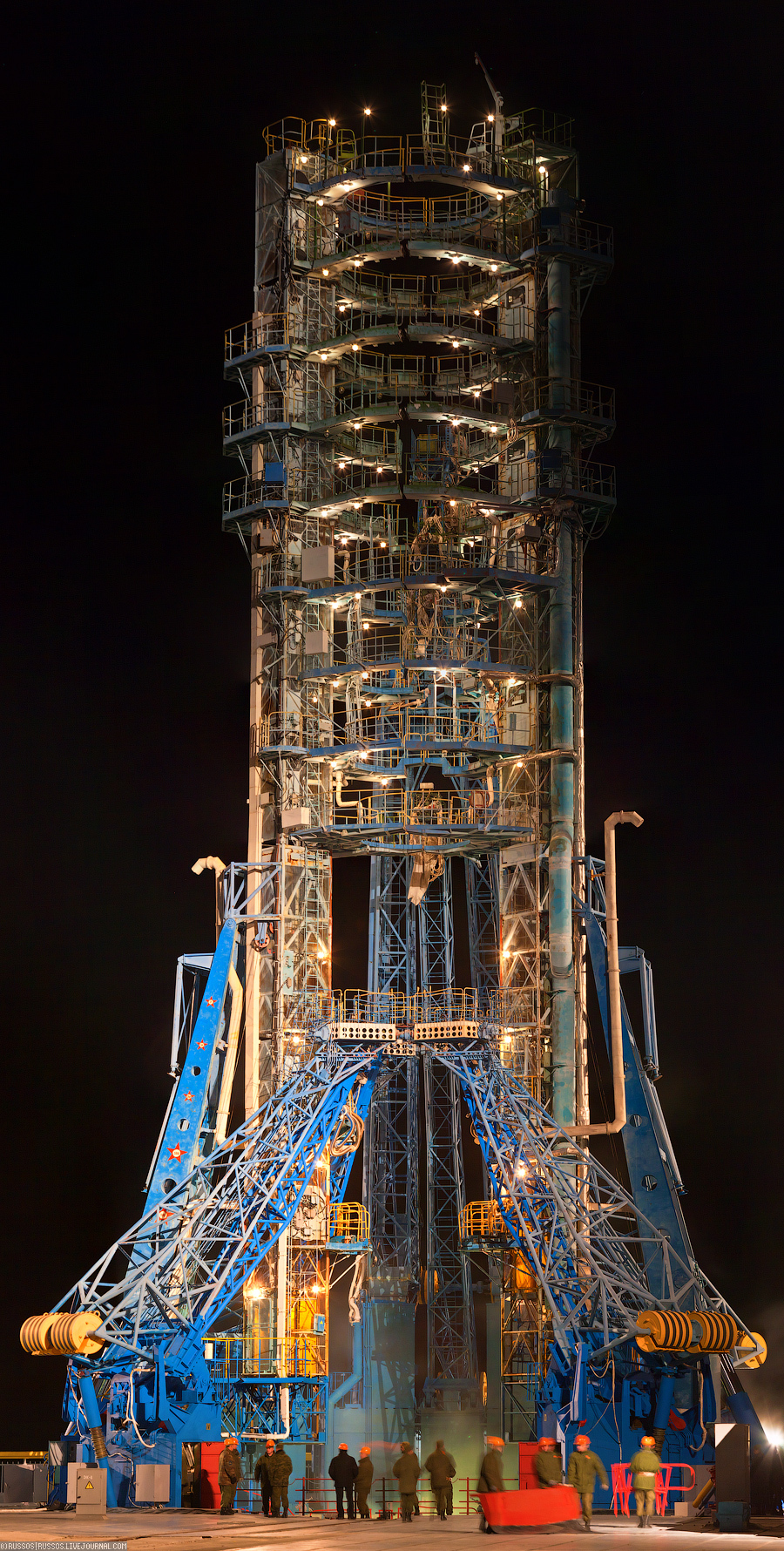
Третий пункт обусловлен постоянными апгрейдами ракет семейства «Р-7». Сначала была простая одноуровневая площадка:
Когда «Р-7» стала «Востоком», к одноуровневой площадке добавили подвижную башню обслуживания:

Для «Восходов» и «Молний» ещё добавили уровней:

Итог немного предсказуем 🙂
Это Плесецк, тут 9 уровней, на Байконуре 8.

Несмотря на красивый вид, сооружение не очень комфортное. Площадки открытые, продуваются всеми ветрами, и работа в мороз или жару — это незаметный героизм стартовых расчетов. Поэтому, когда стали строить старт «союзов» в Куру, спроектировали обычную мобильную башню (был ещё один фактор, о нем будет чуть позже):
Хороший результат эксплуатации новой башни привел к тому, что на «Восточном» будет такая же.
Пушки к бою едут задом
Отдельная интересная дилемма — это транспортировка ракеты на старт. И, конечно же, есть много возможных вариантов решения, со своими плюсами и минусами. Во-первых, ракету в сборе можно вообще никуда не везти — собрать сразу на старте, проверить и пустить. Во-вторых, ракету можно собрать горизонтально, отвезти на старт, установить её вертикально, и пустить.
В-третьих, ракету можно собрать вертикально, и отвезти на старт сразу в вертикальном положении. А ещё можно эти варианты смешать.

Первый вариант реализуют, в основном, для небольших ракет (потому что это просто):
Снова Taurus. Слева, укрытая синим, первая ступень.
Также с этим вариантом экспериментировали, внезапно, индусы. Ракета PSLV собиралась сразу на стартовом столе.
- Не нужно возить ракету на старт.
- Нужно увозить от старта монтажно-испытательный комплекс.

Вариант второй — это советская/российская школа, а также SpaceX. «Союзы», «Протоны», «Космосы», «Н-1», «Энергии», «Зениты» и «Falcon’ы» едут на старт в горизонтальном положении. Транспортер также является установщиком, и вертикализует ракету.
- Длинный МИК построить проще, чем высокий.
- Везти в горизонтальном положении проще.
- От ракеты и полезной нагрузки требуется дополнительная прочность на изгиб.
- На ракету и полезную нагрузку действует сила только в направлении «верх-низ».
- Не нужен установщик и процедура вертикализации.
- Нужен высокий МИК.
- Несколько более сложная транспортировка.
- Сочетает в себе удобства горизонтальной транспортировки и вертикальной сборки.
- Требуется чистая комната, мини-МИК в башне обслуживания.
Дилемма башни
Следующий вопрос — а нужна ли вообще башня обслуживания? Давайте все проверки проводить в МИКе, а пусковые операции производить автоматикой. В этом случае некому и незачем будет ходить по башне обслуживания, и её вообще не нужно будет строить. Идея привлекательная, но, как выяснилось, у неё есть и свои недостатки. Её первыми реализовали в СССР для ракеты «Зенит».
Процесс установки, заправки, подготовки к пуску и пуска был полностью автоматизирован и не требовал от человека ничего кроме работы головой и нажатия кнопок. Старт получился простым и минималистичным:
Всё бы хорошо, но такой старт, во-первых, непригоден для пилотируемых пусков. Для того же «Зенита», который решили сделать пилотируемым, пришлось строить «скворечник» башни обслуживания:
Второй недостаток — на старте ничего нельзя исправить. Если возникает мелкий отказ, который при наличии башни можно было бы исправить за полчаса, ракету приходится снимать со старта и везти обратно в МИК. Башня также отсутствует у SpaceX, и те, кто следят за пусками Falcon’ов, наверняка заметили, что пуски регулярно переносятся на более позднюю дату. Конечно, неисправности бывают разные, и не все можно устранить на месте, но наличие башни дает возможность исправлять мелкие отказы быстро.
Дилемма башни 2

Ещё один вопрос, опять же связанный с башней — это вопрос её подвижности. Насколько необходимо и обосновано тратить деньги на то, чтобы башня могла отъезжать от старта? Тут руководствуются инженерной целесообразностью. Неподвижная башня должна выдерживать взрыв ракеты на старте.
Подвижная же должна иметь моторы, колёса и рельсы, а также систему растягивания и собирания коммуникаций и трубопроводов. Что получается проще, дешевле и привычнее, то и делают. Здесь нет национальных школ, в каждом проекте инженеры делают как считают более удобным. Например, для «Протона» сделали мобильную башню:

А для «Ангары» — уже стационарную:
Трон Гулливера
Нельзя оставить без внимания стартовые комплексы для сверхтяжелых ракет. Размеры и сложность этих систем, а также выбранные технические решения просто поразительны.

Американцы действовали в традициях своей школы — вертикальной сборки и транспортировки. Ключевым элементом стал тягач-транспортер, который возил ракету вместе с частью стартового стола и башни обслуживания. Это менее известно, но была ещё вторая половина башни, которую возил тот же тягач:
«Сатурн-V» с верхней частью стартового стола и одной башней обслуживания едет на старт. Вторая башня ждёт своей очереди в «тупике» дорог для тягача. Вдалеке видно здание вертикальной сборки.

Небольшой инженерный курьез. Миссии «Аполлонов» к станции «Скайлэб» и миссия «Союз-Аполлон» использовали этот же стартовый комплекс LC39, но меньшую ракету — Saturn-IB. Для того, чтобы ракета стояла напротив тех же мачт на гораздо большем стартовом сооружении, был сделан «детский стульчик» — ферменная конструкция, поднявшая ракету до высоты «Сатурна-V»:

Советская ракета «Н-1» тоже была сделана в родных традициях, её везли в горизонтальном положении на гигантском установщике два тепловоза по параллельным рельсам. Разве что башня обслуживания была несколько необычной — достаточно небольшой.
С началом разработки многоразовых кораблей стартовые комплексы ждала одинаковая судьба — они были переделаны под многоразовые корабли по обеим сторонам океана.
В США была сделана очень изящная башня обслуживания с поворотным элементом:
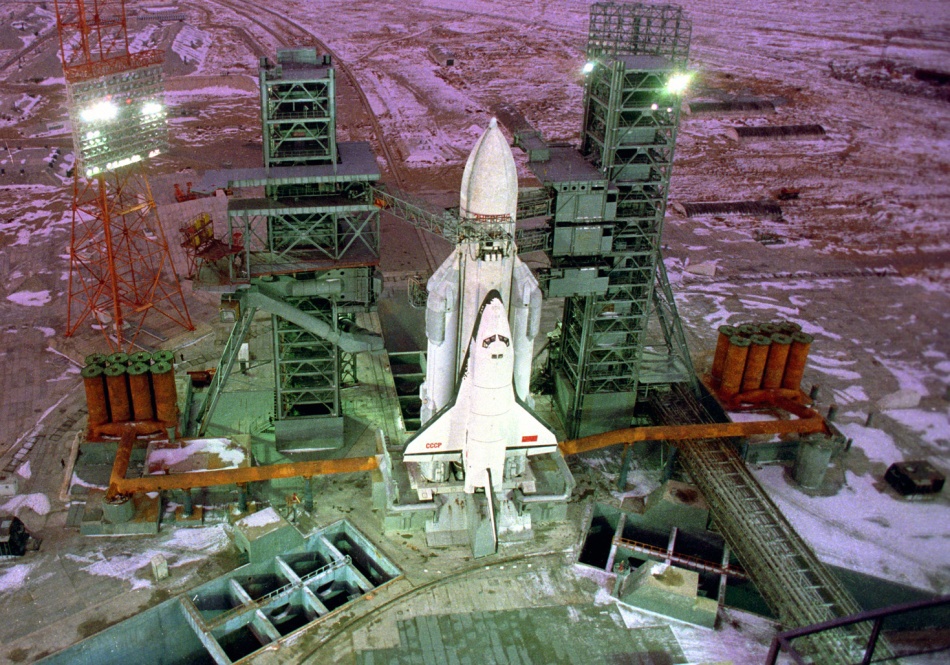
В СССР был сделан комплекс из двух башен рядом:
Большие трубы на левой башне — система посадки и аварийной эвакуации экипажа. Фото с сайта Буран.ру, копирайт пришлось отрезать при кадрировании.
Газоводы

Если вы внимательно смотрели на поверхность под стартовым столом на фотографиях, то наверняка заметили туннели, проёмы, углубления. Это газоводы, они нужны для отведения выбрасываемых ракетой газов. Для мощных двигателей тяжелых ракет простого конуса под днищем уже недостаточно.
Конструкция их может быть разной, в США чаще использовали насыпной стартовый стол с орошаемыми водой газоводами на уровне земли. Вода смягчает ударную волну и снижает температурную нагрузку на стенки. У нас газоводы обычно сухие и расположены ниже уровня земли. Апрельский пуск «Falcon’a» показал, что в случае использования орошаемых подземных газоводов стоит следить за уровнем жидкости в них — ракета стартовала сквозь фонтан грязи, хорошо, что это не вызвало проблем.
Заключение
В заключение красивое видео замедленного пуска «Зенита» на «Морском старте». Видна работа стартовых механизмов и испарение падающего льда.
Источник: habr.com