Полезная информация для любителей делать своими руками и не только.
Пусковая диаграмма ДПТ.
Для ограничения пускового тока в цепь якоря вводят Rдоб.
U=E+IR, где R=Rя+Rдоб → . При пуске ω=0, → Е=0, → . В паспорте электродвигателя указывается его перегрузочная способность
(2…2,5 у двигателя постоянного тока)
Пусковые сопротивления (R) выполняют секционными:
R1, R2, R3 – сопротивления ступеней
r1, r2, r3 – сопротивления секций
В процессе пуска пики тока (I) и момента (М) выбирают одинаковыми, тогда пусковая диаграмма будет иметь вид:
Для любых соседних характеристик пусковой диаграммы отношение сопротивления (R) ступеней постоянно (const).
Для расчета сопротивления (R) нужно задаться двумя из трух следующих величин:
- I1 – пиковый;
- I2 – переключения;
- Z – число ступеней.
При контакторном управлении:
Z=1…2 – Р < 10 кВт
Z=2…3 – Р=10…50 кВт
Z=3…4 – Р > 50 кВт
ПОЧЕМУ происходят ДТП и как от них ИЗБАВИТЬСЯ?
Различают форсированный и нормальный пуск. При форсированном пуске задаются I1, выбирая его возможно большим (по условиям коммутации).
При нормальном пуске задаются I2 (на 10…20% больше Iстатического), I1 рассчитывают:
По пусковой диаграмме рассчитывают сопротивление (R) ступеней и секций сопротивления (R) пускового
1. Аналитический метод.
; ;
; ;
r1=R1-R2; r2=R2-R3; r3=R3-Rя
2. Графический метод.
ω*=1-R* (при I=Iн) см. рисунок 1
R1*=ае; R2*=ad; R3*=ac; Rя*=ab; r1*=de; r2*=cd; r3*=bc.
Для смягчения первого пускового толчка момент иногда выполняют ½ предварительные ступени, которые обеспечивают меньший начальный момент (характеристики 0 и 0′)
Источник: pomoshnichkov.ru
Устройство и принцип действия ДПТ
Электрические двигатели постоянного тока (ДПТ) отличает от других двигателей наличие специального механического коммутатора – коллектора. Несмотря на то, что из-за этого ДПТ менее надежны и дороже двигателей переменного тока, имеют большие габариты, они находят применение, когда их особые свойства имеют решающее значение. Часто ДПТ обладают преимуществами перед двигателями переменного тока по диапазону и плавности регулирования частоты вращения, по перегрузочной способности и экономичности, по возможности получения характеристик специального вида, и т.д.
В настоящее время ДПТ применяют в электроприводах прокатных станов, различных подъемных механизмов, металлообрабатывающих станков, роботов, на транспорте и т.д. ДПТ небольшой мощности используют в различных автоматических устройствах.
Устройство и принцип действия ДПТ
Внешний вид двигателя постоянного тока показан на рис. 1, а его поперечный разрез в упрощенном виде – на рис. 2. Как и любая электрическая машина, он состоит из двух основных частей – статора и ротора. Статор неподвижен, ротор вращается. Статор состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 4. Главные полюсы 2 имеют полюсные наконечники, служащие для равномерного распределения магнитной индукции по окружности якоря. На главных полюсах размещают обмотки возбуждения 3, а на дополнительных – обмотки дополнительных полюсов 5.
След. «ДТП»
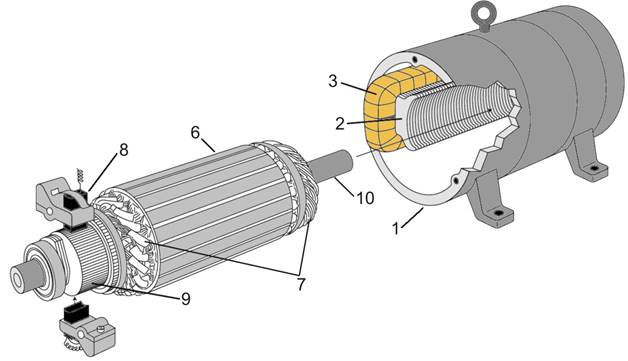
Рис. 1. Внешний вид двигателя постоянного тока
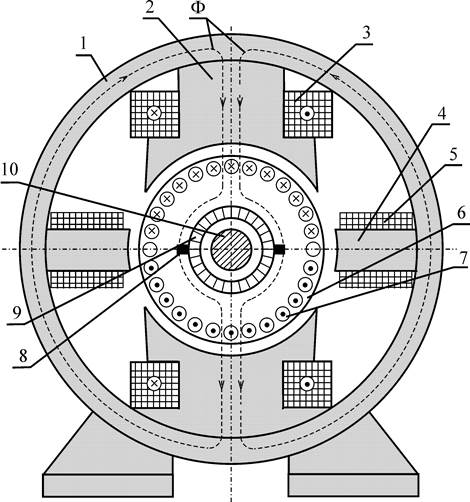
Рис. 2. Поперечный разрез ДПТ (условное изображение): 1 – корпус; 2 – главные полюсы; 3 – обмотка возбуждения; 4 – дополнительные полюсы; 5 – обмотка дополнительных полюсов; 6 – якорь; 7 – обмотка якоря; 8 – щетки; 9 – коллектор; 10 – вал.
В пазах, расположенных на поверхности якоря 6, размещается обмотка якоря 7, выводы от которой присоединяют к расположенному на валу 10 коллектору 9. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или медно-графитные щетки 8.
Обмотка возбуждения машины питается постоянным током и служит для создания основного магнитного поля, показанного на рис. 2 условно с помощью двух силовых линий, изображенных пунктиром. Дополнительные полюсы 4 уменьшают искрение между щетками и коллектором.
Обмотку дополнительных полюсов 5 соединяют последовательно с обмоткой якоря 7 и на электрических схемах часто не изображают. На рис. 2 показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличивается число комплектов щеток и дополнительных полюсов.
У ДПТ с независимым возбуждением, как показано на рис. 3, электрические цепи обмоток якоря 1 и возбуждения 2 электрически не связаны и подключаются к различным источникам питания с напряжениями и . Как правило, . В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
Двигатели относительно небольшой мощности обычно изготавливают на одинаковые напряжения и . В этом случае цепи обмоток якоря и возбуждения соединяют между собой параллельно и подключают к общему источнику питания с напряжением . Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
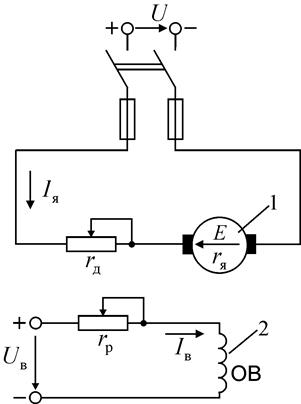
Рис. 3. Электрическая схема подключения ДПТ независимого возбуждения: 1 – цепь обмотки якоря; 2 – цепь обмотки возбуждения.
При подключении двигателя к источнику питания в обмотке якоря протекает ток Iя, который взаимодействует с магнитным полем, создаваемым обмоткой возбуждения. В результате этого возникает электромагнитный момент, действующий на якорь
где k – коэффициент, зависящий от конструктивных параметров машины; Ф – магнитный поток одного полюса.
При превышении моментом М момента сопротивления нагрузки Мс якорь начинает вращаться с угловой скоростью w и в нем наводится ЭДС
У двигателей полярность ЭДС Е противоположна полярности напряжения источника U, поэтому с ростом скорости w ток Iя уменьшается
где rя – сопротивление якорной цепи двигателя при rд = 0.
Из соотношения (1) следует, что это приводит к снижению электромагнитного момента. При равенстве моментов и скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
Пуск двигателя
В первое мгновение при пуске скорость двигателя w = 0 и в соответствии с формулой (2) ЭДС якоря Е = 0. Поэтому при подключении якоря двигателя к напряжению пусковой ток якоря , как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
Значение сопротивления относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя . Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
Как следует из формулы (4), одним из вариантов ограничения пускового тока является увеличение суммарного сопротивления якорной цепи ДПТ при неизменном значении напряжения U. Для этого последовательно с якорем включают дополнительный пусковой реостат (на рис. 3 не показан), который обычно выполняют в виде нескольких ступеней. Ступени пускового реостата выключают поэтапно по мере увеличения скорости двигателя. При этом в якоре двигателя за время пуска могут выделяться значительные потери мощности.
Более экономичным способом снижения пускового тока является пуск ДПТ при плавном увеличении напряжения на якоре U по мере разгона двигателя и увеличения ЭДС Е. Как следует из выражения (3), можно подобрать такой темп увеличения напряжения U, при котором ток на протяжении всего времени пуска не будет превышать допустимого значения. В лабораторной установке, используемой при выполнении данной работы, используется именно этот более экономичный способ ограничения пускового тока.
Дата добавления: 2016-06-29 ; просмотров: 9923 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник: poznayka.org
Методические указания по выполнению
Изучение основных характеристик и режимов работы двигателей постоянного тока (ДПТ) с последовательным возбуждением (ПВ), практическое ознакомление с двигательным режимом, режимами торможения противовключением (тормозной спуск), и динамического торможения, с реостатным регулированием скорости вращения ДПТ, методами экспериментального получения электромеханических и механических характеристик ДПТ в указанных режимах.
2. ПРИБОРЫ И ОБОРУДОВАНИЕ
Лабораторный стенд ИДПТ-П состоит из приборного блока и электромеханического агрегата.
Основные технические характеристики двигателя МБП — 3Ш – (Н)
Напряжения питания, В
Мощность, Вт
Ток потребления, не более, А
Частота вращения вала, об /мин
Момент на валу, кГсм
Сопротивление обмотки якоря при 20’С, Ом
3. ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
3.1. Конструкция ДПТ
ДПТ состоит из трех основных частей: статора с обмоткой возбуждения, ротора с якорной обмоткой и щеточно-коллекторного узла, необходимого для подведения напряжения к обмотке якоря (далее ОЯ). При этом щетки неподвижны, а коллектор жестко связан с якорем.
В ДПТ для улучшения условий коммутации могут быть также предусмотрены и дополнительные полюса, а для компенсации поперечной реакции якоря и компенсационные обмотки на полюсах статора.
В зависимости от способа электромагнитного возбуждения ДПТ подразделяют на ДПТ с НВ, ПВ и смешанным возбуждением. Иногда встречается название «ДПТ с параллельным возбуждением», однако такой ДПТ является частным случаем ДПТ с НВ и этот термин применяется как доопределяющий.
В данной работе исследуются ДПТ с ПВ.
Двигатель постоянного тока с последовательным возбуждением
Характерной особенностью ДПТ с ПВ является то, что его обмотка возбуждения (ПОВ) с сопротивлением посредством щеточно-коллекторного узла последовательно соединена с обмоткой якоря с сопротивлением , т.е. в таких двигателях возможно только электромагнитное возбуждение.
Принципиальная электрическая схема включения ДПТ с ПВ представлена на рис.3.1.

Рис. 3.1. Схема электрическая принципиальная включения ДПТ с ПВ.
Для осуществления пуска ДПТ с ПВ последовательно с его обмотками включается добавочный реостат .
Уравнения электромеханической характеристики ДПТ с ПВ
Ввиду того, что в ДПТ с ПВ ток обмотки возбуждения равен току в обмотке якоря, в таких двигателях в отличие от ДПТ с НВ проявляются интересные особенности.
Поток возбуждения ДПТ с ПВ связан с током якоря (он же является и током возбуждения) зависимостью, называемой кривой намагничивания, представленной на рис. 3.2.
Как видно зависимость для малых токов близка к линейной, а с увеличением тока проявляется нелинейность, связанная с насыщением магнитной системы ДПТ с ПВ. Уравнение электромеханической характеристики ДПТ с ПВ так же и для ДПТ с независимым возбуждением имеет вид:

Рис. 3.2. Кривая намагничивания ДПТ с ПВ.
Из-за отсутствия точного математического описания кривой намагничивания, при упрощенном анализе можно пренебречь насыщением магнитной системы ДПТ с ПВ, т. е. принять зависимость между потоком и током якоря линейной, как это показано на рис. 3.2 пунктирной линией. В этом случае можно записать:
где — коэффициент пропорциональности.
Для момента ДПТ с ПВ с учетом (3.17) можно записать:
Из выражения (3.3) видно, что в отличие от ДПТ с НВ у ДПТ с ПВ электромагнитный момент зависит от тока якоря не линейно, а квадратично.
Для тока якоря можно в этом случае записать:
Если подставить выражение (3.4) в общее уравнение электромеханической характеристики (3.1), то можно получить уравнение для механической характеристики ДПТ с ПВ:
Отсюда следует, что при ненасыщенной магнитной системе механическая характеристика ДПТ с ПВ изображается (рис. 3.3) кривой, для которой ось ординат является асимптотой.

Рис. 3.3. Механическая характеристика ДПТ с ПВ в предположении ненасыщенности его магнитной цепи.
Значительное увеличение скорости вращения двигателя в области малых нагрузок обуславливается соответствующим снижением величины магнитного потока.
Уравнение (3.5) является оценочным, т.к. получено при допущении о ненасыщенности магнитной системы двигателя. На практике по экономическим соображениям электродвигатели рассчитываются с определенным коэффициентом насыщения и рабочие точки лежат в районе колена перегиба кривой намагничивания.
В целом, анализируя уравнение механической характеристики (3.5), можно сделать интегральный вывод о «мягкости» механической характеристики, проявляющейся в резком уменьшении скорости при увеличении момента на валу двигателя.
Если рассматривать механическую характеристику, изображенную на рис. 3.3 в области малых нагрузок на валу, то можно сделать вывод, что понятие скорости идеального холостого хода для ДПТ с ПВ отсутствует, т. е. при полном сбросе момента сопротивления двигатель идет в «разнос». При этом его скорость теоретически стремится к бесконечности.
С увеличением нагрузки скорость вращения падает и равняется нулю при значении момента короткого замыкания (пускового):
Далее скорость вращения асимптотически приближается к значению в 4 квадранте системы координат.
Как видно из (3.21) у ДПТ с ПВ пусковой момент при отсутствии насыщения пропорционален квадрату тока короткого замыкания- При конкретных расчетах пользоваться оценочным уравнением механической характеристики (3.5) нельзя. В этом случае построение характеристик приходится вести графо-аналитическими способами. Как правило, построение искусственных характеристик производится на основании данных каталогов, где приводятся естественные характеристики: и .
В реальном ДПТ с ПВ вследствие насыщения магнитной системы но мере увеличения нагрузки на валу (а, следовательно, и тока якоря) в области больших моментов, наблюдается прямая пропорциональность между моментом и током, поэтому механическая характеристика становится там практически линейной. Это относится как к естественной , так и к искусственным механическим характеристикам.
Кроме того, в реальном ДПТ с ПВ даже в режиме идеального холостого хода существует остаточный магнитный поток , вследствие чего скорость идеального холостого хода будет иметь конечную величину и определяться выражением:
Но так как величина незначительна, то может достигать значительных величин. Поэтому у ДПТ с ПВ, как правило, запрещается сбрасывать нагрузку на валу более чем на 80% от номинальной.
Исключением являются микродвигатели, у которых и при полном сбросе нагрузки остаточный момент трения достаточно велик для того, чтобы ограничить скорость холостого хода. Склонность ДПТ с ПВ идти в «разнос» ведет к тому, что их роторы выполняются механически усиленными.
Сравнение пусковых свой ств дв игателей с ПВ и НВ
Как следует из теории электрических машин, двигатели рассчитываются на конкретный номинальный ток . При этом ток короткого замыкания не должен превышать значения
где — коэффициент перегрузки по току, который обычно лежит в диапазоне от 2 до 5.
В случае , если имеются два двигателя постоянного тока: один с независимым возбуждением, а второй с последовательным возбуждением, рассчитанные на одинаковый ток , то допустимый ток короткого замыкания у них также будет одинаковым, в то время как пусковой момент у ДПТ с НВ будет пропорционален току якоря в первой степени:
а у идеализированного ДПТ с ПВ согласно выражению (3. 6 ) квадрату тока якоря;
Из этого следует, что при одинаковой перегрузочной способности пусковой момент ДПТ с ПВ превосходит пусковой момент ДПТ с НВ.
Ограничение величины
При прямом пуске двигателя ударные значения тока , поэтому обмотки двигателя могут быстро перегреться и выйти из строя, кроме того большие токи негативно влияют и на надежность щеточно-коллекторного узла.
(Оказанное обуславливает необходимость ограничения до какой-либо приемлемой величины либо введением в якорную цепь дополнительного сопротивления , либо уменьшением питающего напряжения .
Величина максимально допустимого тока определяется коэффициентом перегрузки .
Для микродвигателей обычно осуществляется прямой пуск без добавочные сопротивлений, но с ростом габаритов ДПТ необходимо производить реостатный пуск . о собенно, если привод с ДПТ с ПВ используется в нагруженных режимах с частыми пусками и торможениями.
Способы регулирования угловой скорости вращения ДПТ с ПВ
Как следует из уравнения электромеханической характеристики (3.1) угловую скорость вращения можно регулировать, как и у ДПТ с НВ, изменением , и .
Регулирование скорости вращения изменением питающего напряжения
Как следует из выражения механической характеристики (3.1) при изменении питающего напряжения можно получить семейство механические характеристик, изображенных на рис. 3.4. При этом величина напряжения питания регулируется, как правило, при помощи тиристорных преобразователей напряжения или систем «Генератор-двигатель».

Рис 3.4. Семейство механических характеристик ДПТ с ПВ при различных значениях напряжения питания якорной цепи .
Диапазон регулирования скорости разомкнутых систем не превышает 4:1, но при введении обратных связей он может быть на несколько порядков выше. Регулирование угловой скорости вращения в этом случае осуществляется вниз от основной (основной скоростью называется скорость, соответствующая естественной механической характеристике). Достоинством способа является высокий КПД.
Регулирование угловой скорости вращения ДПТ с ПВ введением последовательного добавочного сопротивления в цепь якоря
Как следует из выражения ( 3.1) последовательное введение добавочного сопротивления изменяет жесткость механических характеристик и также обеспечивает регулирование угловой скорости вращение идеального холостого хода .
Семейство механических характеристик ДПТ с ПВ для различных значений добавочного сопротивления (рис. 3.1) представлено на рис. 3.5.

Рис. 3.5 Семейство механических характеристик ДПТ с ПВ при различных значениях последовательного добавочного сопротивления .
Регулирование осуществляется вниз от основной скорости.
Диапазон регулирования при этом обычно не превышает 2,5:1 и зависит от нагрузки. Регулирование при этом целесообразно проводить при постоянном моменте сопротивления.
Достоинством данного способа регулирования является его простота, а недостатком большие потери энергии на добавочном сопротивлении.
Этот способ регулирования нашел широкое применение в крановых и тяговых электроприводах.
Регулирование угловой скорости вращения
изменением потока возбуждения
Так как у ДПТ с ПВ обмотка якоря двигателя последовательно связана с обмоткой возбуждения, то для изменения величины потока возбуждения необходимо зашунтировать обмотку возбуждения реостатом (рис. 3.6), изменения положения которого влияет на ток возбуждения. Ток возбуждения в этом случае определяется как разность между током якоря и током в шунтирующем сопротивлении . Так в предельных случаях при ∞ и при .

Рис. 3.6. Схема электрическая принципиальная регулирования угловой скорости вращения ДПТ с ПВ изменением потока возбуждения .
Регулирование осуществляется в этом случае вверх от основной угловой скорости вращения, вследствие уменьшения величины магнитного потока. Семейство механических характеристик ДПТ с ПВ для различных значений шунтирующего реостата представлено на рис. 3.7.

Рис. 3.7. Механические характеристики ДПВ с ПВ при различных значениях шунтирующего сопротивления
С уменьшением величины возрастает. Данный способ регулирования является достаточно экономичным, т.к. величина сопротивления последовательной обмотки возбуждения мала и, соответственно, величина также выбирается малой.
Потери энергии в этом случае примерно такие же, как у ДПТ с НВ при регулировании угловой скорости изменением потока возбуждения. Диапазон регулирования при этом, как правило, не превышает 2:1 при постоянной нагрузке.
Способ находит применение в электроприводах требующих ускорения при малых нагрузках, например, в безмаховиковых ножницах блюмингов.
Все перечисленные выше способы регулирования характеризуются отсутствием конечной угловой скорости вращения идеального холостого хода , но необходимо знать, что существуют схемотехнические решения, позволяющие получать конечные значения .
Для этого шунтируются реостатами обе обмотки двигателя или только обмотка якоря. Эти способы неэкономичны в энергетическом отношении, но позволяют достаточно кратковременно получать характеристики повышенной жесткости с малыми конечными скоростями идеального холостого хода. Диапазон регулирования при этом не превышает 3:1, а регулирование скорости осуществляется вниз от основной. При переходе в генераторный режим в этом случае ДПТ с ПВ не отдает энергию в сеть, а работает генератором замкнутым на сопротивление .
Необходимо отметить, что в автоматизированных электроприводах величина сопротивления регулируется, как правило, импульсным методом периодическим шунтированием полупроводниковым вентилем сопротивлений или с определенной скважностью.
Тормозные режимы работы ДПТ с ПВ
Для ДПТ с ПВ возможно торможение противовключением и динамическое торможение. В отличи и от двигателя с независимым возбуждением у ДПТ с ПВ отсутствует рекуперативное торможение с отдачей энергии в сеть, т. к. его ЭДС не может быть больше приложенного напряжения.
Торможение ДПТ с ПВ противовключением
Как и у двигателя с независимым возбуждением у ДПТ с ПВ возможны:
• торможение с изменением полярности напряжения на обмотке якоря (при обеспечении неизменности направления тока в обмотке возбуждения);
Противовключение изменением полярности подводимого к якорю напряжения
Если у ДПТ с ПВ, работающего в двигательном режиме изменить полярность напряжения на обмотке якоря на противоположную при одновременном переключении концов последовательной обмотки возбуждения, то ток якоря изменит свое направление в соответствии с выражением:
Двигатель переходит в тормозной режим, и его механическая характеристика изображается во 2 квадранте (рис. 3.8).

Рис. 3.8 Механические характеристики в режиме торможения противовключением изменением полярности подводимого к якорю напряжения при различных значениях последовательного добавочного сопротивления .
При этом происходит интенсивное торможение и угловая скорость вращения двигателя падает до нуля. Если в этот момент времени, соответствующий достижению точки N на механической характеристике не отключить двигатель от сети, то направление вращения изменится на противоположное, т.е. двигатель реверсируется. Это, безусловно, накладывает ограничения на применимость данного способа торможения.
С энергетической точки зрения данный способ не экономичен, т. к. большое количество энергии выделяется на добавочном сопротивлении, которое необходимо включить в якорную цепь для ограничения бросков тормозного тока. Достоинство способа — высокая эффективность торможения.
Тормозной пуск
Этот режим торможения имеет место при превышении активным моментом сопротивления величины пускового момента (или момента короткого замыкания ). В этом случае ток якоря двигателя также определяется по формуле (3.9), т. к. при этом направление вращения, а, следовательно, и знак ЭДС изменяются на противоположные.
Из выражения (3.9), следует, что ток якоря в этом случае превышает значение тока короткого замыкания. Поэтому для реализации данного режима необходимо ограничивать тормозной ток введением последовательного добавочного сопротивления.
Соответствующие механические характеристики тормозного спуска изображаются в 4 квадранте как продолжение характеристик, соответствующих двигательному режиму (рис. 3.9).

Рис. 3.9 Механические характеристики в режиме тормозного спуска при различных значениях последовательного добавочного
Режим тормозного спуска широко применяется в грузоподъемных механизмах для опускания грузов.
С энергетической точки зрения тормозной спуск является не экономичным, ввиду тепловых потерь на добавочных сопротивлениях.
Режим динамического торможения ДПТ с ПВ
Динамическое торможение ДПТ с ПВ возможно реализовать двумя способами:
• с независимым возбуждением;
Динамическое торможение ДПТ с независимым возбуждением
Оно осуществляется как и у ДПТ с НВ. Обмотка возбуждения отключается от якорной цепи и подключается через токоограничительный резистор к источнику постоянного тока, а якорная обмотка замыкается на тормозное сопротивление (рис. 3.10).

Рис. 3.10 Схема электрическая принципиальная торможения ДПТ с независимым возбуждением.
Уравнение механической характеристики для этого режима запишется в виде:
Ток якоря можно определить как:
т.е. в отличие от двигательного режима ток якоря, при постоянстве направления потока возбуждения, изменяет свой знак на противоположный, что и обуславливает процесс торможения.
Достоинством данного способа является достаточно высокая экономичность, а к недостаткам следует отнести снижение эффективности торможения с уменьшением скорости вращения, т. к. из выражения (3.10) следует, что тормозной момент Мт прямо пропорционален .
Семейство механических характеристик для данного способа торможения представление на рис. 3.1 1. Как видно, с увеличением величины тормозного сопротивления жесткость характеристик падает.

Рис. 3. 1 1 . Семейство механических характеристик ДПТ в режиме динамического торможения с независимым возбуждением при различных значениях последовательного добавочного сопротивления .
Динамическое торможение с самовозбуждением
R этом режиме якорь ДПТ с ПВ и обмотка возбуждения ПОВ отключаются от сети и подключаются к тормозному сопротивлению согласно схеме, представленной на рис.3. 1 2.

Рис. 3. 1 2. Схема электрическая принципиальная включения ДПТ С ПВ в режим динамического торможения с самовозбуждением.
При этом надо иметь в виду, что если ДПТ с ПВ переводится в режим динамического торможения с самовозбуждением из двигательного режима, то необходимо перекоммутировать последовательную обмотку возбуждения ПОВ таким образом, чтобы направление тока в ней осталось неизменным. Это делается во избежание размагничивания магнитной системы ДПТ с ПВ.
ДПТ с ПВ в этом случае возбуждается для конкретного значения тормозного сопротивления лишь при определенных значениях скорости вращения. Возбудившись, ДПТ с ПВ развивает тормозной момент.
При этом вначале происходит интенсивное самовозбуждение, которое ведет к скачку тормозного момента. Такое ударное, а не «вязкое» торможение для ряда механизмов бывает неприемлемым и это ограничивает применимость данного способа торможения.
Достоинством торможения с самовозбуждением является его экономичность. Двигатель в этом случае не потребляет энергию из сети.
Сравнение ДПТ с НВ и с ПВ
Как следует из уравнения для механических характеристик «жесткость» характеристик ДПТ с НВ выше, чем ДПТ с ПВ, что часто отмечается, как их очевидное достоинство, т.к. у ДПТ с НВ с увеличением нагрузки скорость вращения падает по линейному закону, но не так интенсивно как это происходит у ДПТ с ПВ.
Это, а также то, что в режиме холостого хода ДПТ с ПВ идет в «разнос» и предопределяет большую применяемость в промышленности именно ДПТ с НВ.
Тем не менее, в ряде отраслей особенности ДПТ с ПВ являются предпочтительными. Это относится к различным тяговым электроприводам, при использовании в которых ДПТ с ПВ развиваются существенно большие пусковые моменты, чем при использовании ДПТ с НВ.
В механизмах с пульсирующей нагрузкой, например, компрессорах, также целесообразно использовать ДПТ с ПВ, так как у них мощность потребления энергии приблизительно постоянна, что предпочтительно для сети.
4. Описание лабораторного стенда
Лабораторный стенд состоит из приборного блока и электромеханического агрегата соединенных кабелями с приборным блоком и располагаемых на столе рядом с приборным блоком. Предусмотрен вариант поставки лабораторного стенда в комплекте с ПЭВМ.
4.1. Приборный блок
На левой боковой стенке приборного блока расположены сетевой разъем и автомат защиты ( QF 1). К сетевому разъему подключатся кабель, подводящий к стенду сетевое напряжение 380 В. Автомат защиты QF 1 служит для подключения стенда к источнику сетевого питания и автоматического выключения при превышении потребляемым из сети током допустимого значения из-за коротких замыканий и других причин.
Лицевая панель стенда конструктивно разделена на две части: левую и правую. На лицевой панели расположены органы управления стендом, индикаторы, измерительные приборы, разъемы для подключения к приборному блоку внешних устройств и изображение электрической схемы установки.
Источник: electrostend.ru